|
|
| |||
|
(19)”ŚČƹŌ¹ń”ŪĘüĖܹńĘƵöÄ£”Ź£Ź£Š”Ė
(12)”ŚøųŹó¼ļŹĢ”Ūøų³«ĘƵöøųŹó”Ź£Į”Ė
(11)”Śøų³«ČÖ¹ę”ŪĘĆ³«£²£°£°£°”Ż£³£µ£·£±£¹£“”Ź£Š£²£°£°£°”Ż£³£µ£·£±£¹£“£Į”Ė
(43)”Śøų³«Ęü”ŪŹæĄ®£±£²ĒÆ£±£²·ī£²£¶Ęü”Ź£²£°£°£°”„£±£²”„£²£¶”Ė
(54)”ŚČÆĢĄ¤ĪĢ¾¾Ī”Ūøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą
(51)”Ś¹ńŗŻĘƵöŹ¬ĪąĀč£·ČĒ”ŪG06F 17/60 G05D 1/02 G07D 9/00 416”Ś£Ę£É”ŪG06F 15/21 C G05D 1/02 P G07D 9/00 416 Z”Śæ³ŗŗĄĮµį”ŪĢ¤ĄĮµį
”ŚĄĮµį¹ą¤Īæō”Ū£±£ø
”Ś½Š“ź·ĮĀÖ”Ū£Ļ£Ģ
”ŚĮ“ŹĒæō”Ū£³£°
(21)”Ś½Š“źČÖ¹ę”ŪĘĆ“źŹæ£±£±”Ż£±£¶£¹£³£ø£ø
(22)”Ś½Š“źĘü”ŪŹæĄ®£±£±ĒÆ£¶·ī£±£¶Ęü”Ź£±£¹£¹£¹”„£¶”„£±£¶”Ė
(71)”Ś½Š“źæĶ”Ū
”Ś¼±ŹĢČÖ¹ę”Ū£°£°£°£°£°£µ£²£²£³
”Ś»įĢ¾Ėō¤ĻĢ¾¾Ī”ŪÉŁ»ĪÄĢ³ō¼°²ń¼Ņ
”Ś½»½źĖō¤Ļµļ½ź”ŪæĄĘąĄīø©Ąīŗź»ŌĆęø¶¶č¾å¾®ÅÄĆę£“ĆśĢÜ£±ČÖ£±¹ę
(72)”ŚČÆĢĄ¼Ō”Ū
”Ś»įĢ¾”Ū±ąÉō Ąµ¹¬
”Ś½»½źĖō¤Ļµļ½ź”ŪæĄĘąĄīø©Ąīŗź»ŌĆęø¶¶č¾å¾®ÅÄĆę£“ĆśĢÜ£±ČÖ£±¹ę ÉŁ»ĪÄĢ³ō¼°²ń¼ŅĘā”””Ź½Š“źÅö»ž¤Ī¤ā¤Ī”½”½±ąÉōø¦Ćķ”Ė
(74)”ŚĀåĶżæĶ”Ū
”Ś¼±ŹĢČÖ¹ę”Ū£±£°£°£°£·£“£°£¹£¹
”ŚŹŪĶż»Ī”Ū
”Ś»įĢ¾Ėō¤ĻĢ¾¾Ī”ŪĀēæū µĮĒ· ”Ź³°£±Ģ¾”Ė
”Ś„Ę”¼„Ž„³”¼„É”Ź»²¹Ķ”Ė”Ū
3E040 5B049 5H301
”Ś£Ę„攼„ą”Ź»²¹Ķ”Ė”Ū
3E040 AA01 AA10 BA17 FG02 FG03 FG04 FG07 FG11 FL06 5B049 AA03 AA06 BB31 CC03 CC21 CC36 DD02 DD05 EE01 EE31 FF01 FF07 GG02 GG04 5H301 AA02 AA09 BB05 CC03 CC06 CC10 DD01 DD07 DD11 EE02 EE12 EE15 GG12 GG14 JJ01 KK02 KK03 QQ01
(57)”ŚĶ×Ģó”Ū
”Ś²ŻĀź”Ū ĆĻ²¼”¢ĆĻɽ”¢ĆĻ¾å”¢æåĆę”¢æå¾å¤Ž¤æ¤Ļ¶õ“Ö¤Ė„Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż”¢¤Ž¤æ¤ĻČĀĮ÷ĀŠ¾Ż¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ā¤·¤Æ¤ĻĀę¼Ö¤ņ½ŠČÆĆĻÅĄ¤«¤é°øĄčĆĻÅĄ¤Ž¤Ē¼«Ę°ČĀĮ÷¤¹¤ė„·„¹„Ę„ą¤ņ¹½ĆŪ¤¹¤ė”£
ĀåɽæŽ
”Ś²ņ·č¼źĆŹ”Ū „·„¹„Ę„ą¤ĪĄ©øę¶É¤Ė”¢ĶųĶŃ¼ŌĀ¦¤«¤éĘžĪĻ¤µ¤ģ¤ėČĀĮ÷»Ų¼Ø殹ę¤ņ¼õ¤±¼č¤ė¼źĆŹ£±¤Č”¢ČĀĮ÷“°Ī»»žÅĄ¤ĒĘžĪĻ¤µ¤ģ¤ėČĀĮ÷“°Ī»æ®¹ę¤ņ¼õ¤±¼č¤ė¼źĆŹ£²¤Č”¢¼źĆŹ£±¤Č¼źĆŹ£²¤Č¤ĖĄÜĀ³¤µ¤ģ”¢ČĀĮ÷Ļ©¤ČĶĘ“ļ¤ā¤·¤Æ¤ĻĀę¼Ö¤ĪĘ°ŗī¤ņĄ©øę¤¹¤ėČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤·”¢¤¢¤ė¤¤¤Ļ¤µ¤é¤Ė”¢¤³¤ģ¤é¤Ī殹ę¤ņ„·„¹„Ę„ąĘā¤ĪĀ¾¤ĪĄ©øę¶É¤Č¤Ī“Ö¤ĒĘž½ŠĪĻ¤¹¤ė½čĶżĮõĆÖ£³¤Č¤ņČ÷¤Ø¤ė”£
”ŚĘƵöĄĮµį¤ĪČĻ°Ļ”Ū
”ŚĄĮµį¹ą£±”Ū „Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż¤ņ»ŲÄź¤µ¤ģ¤æ°øĄč¤ĖČĀĮ÷¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É¤Ē¤¢¤Ć¤Ę”¢
³ŗČĀĮ÷ĀŠ¾Ż¤ĪČĀĮ÷¤ĖĀŠ±ž¤·¤ĘĮ÷ĪĮ¤ā¤·¤Æ¤ĻČĀĮ÷ĀŠ¾ŻĀå¶ā¤ā¤·¤Æ¤Ļ¼źæōĪĮ¤ā¤·¤Æ¤ĻĄĒ¶ā¤ņħµį¤¹¤ėĢæĪį¤ņČƹŌ¤¹¤ė½čĶżĮõĆÖ¤ņ¶ńČ÷¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£²”Ū „Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż¤ņ»ŲÄź¤µ¤ģ¤æ°øĄč¤ĖČĀĮ÷¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É¤Ē¤¢¤Ć¤Ę”¢
Į°µ„Ķ„Ć„Č„ļ”¼„ƾõČĀĮ÷Ļ©¤ČĄÜĀ³¤µ¤ģ¤Ę¤¤¤ėĀ¾¤ĪʱĶĶ¤Ī„Ķ„Ć„Č„ļ”¼„ƾõ¤ĪČĀĮ÷Ļ©¤ņĄ©øę¤¹¤ėĀ¾¤ĪĄ©øę¶É¤Ė”¢Į°µČĀĮ÷¤Ī¤æ¤į¤ĪĄ©øę¾šŹó¤ā¤·¤Æ¤ĻĪĮ¶ā¾šŹó¤ņ½ŠĪĻ¤·¤Ę”¢Ź£æō¤Ī„Ķ„Ć„Č„ļ”¼„ƤĖ¤Ž¤æ¤¬¤ėČĀĮ÷¤ņ¼Ā¹Ō¤¹¤ė½čĶżĮõĆÖ¤ņ¶ńČ÷¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£³”Ū „Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż¤ņ»ŲÄź¤µ¤ģ¤æ°øĄč¤ĖČĀĮ÷¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É¤Ē¤¢¤Ć¤Ę”¢
ÅĮĮ÷„Į„ć„Ķ„ė·ŠĶ³¤ĒĶųĶŃ¼Ō¤«¤éĘžĪĻ¤µ¤ģ¤ėČĀĮ÷»Ų¼Ø殹ę¤ņ¼õ¤±¼č¤ėČĀĮ÷»Ų¼Ø殹ęĘžĪĻ¼źĆŹ¤Č”¢ČĀĮ÷“°Ī»»žÅĄ¤Ē”¢„攼„ß„Ź„ė¤«¤éĘžĪĻ¤µ¤ģ¤ėČĀĮ÷“°Ī»æ®¹ę¤ņ¼õ¤±¼č¤ėČĀĮ÷“°Ī»æ®¹ęĘžĪĻ¼źĆŹ¤Č”¢³ŗČĀĮ÷»Ų¼Ø殹ęĘžĪĻ¼źĆŹ¤ČČĀĮ÷“°Ī»æ®¹ęĘžĪĻ¼źĆŹ¤Č¤ĖĄÜĀ³¤µ¤ģ”¢Į°µČĀĮ÷Ļ©¤Ŗ¤č¤ÓČĀĮ÷ĀŠ¾Ż¤ņÅėŗܤ·¤æĀę¼Ö¤ĖĀŠ¤·¤ĘČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė½čĶżĮõĆÖ¤ņ¶ńČ÷¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£“”Ū Į°µĄ©øę¶É¤¬”¢Į°µČĀĮ÷ĀŠ¾Ż¤Ī¤Ņ¤Č¤Ä°Ź¾å¤ĪĀ°Ą”¢¤Ŗ¤č¤Ó¾Æ¤Ź¤Æ¤Č¤āČĀĮ÷°øĄč¤ņ“Ž¤ąČĀĮ÷„Č„é„󄶄Ƅ·„ē„ó¾šŹó¤ņµ²±¤¹¤ėČĀĮ÷„Ē”¼„æµ²±¼źĆŹ¤ņ¤µ¤é¤ĖČ÷¤Ø”¢Į°µ½čĶżĮõĆÖ¤¬³ŗČĀĮ÷„Ē”¼„æµ²±¼źĆŹ¤Ėµ²±¤µ¤ģ¤Ę¤¤¤ė¾šŹó¤Ė“š¤Å¤¤¤ĘĮ°µĢæĪį”¢Į°µĄ©øę¾šŹó¤ā¤·¤Æ¤ĻĪĮ¶ā¾šŹó”¢¤Ž¤æ¤ĻĮ°µČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±”¤£²¤Ž¤æ¤Ļ£³µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£µ”Ū Į°µČĀĮ÷ĀŠ¾Ż¤Ī°øĄč¤ņ»Ų¼Ø¤¹¤ė¤æ¤į¤Ī”¢Į°µČĀĮ÷Ļ©¾å¤ĪĆĻÅĄ¤ņ°ģµĮÅŖ¤Ė¼±ŹĢ¤¹¤ė„¢„É„ģ„¹¤Č¤·¤Ę¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬ĘžĪĻ¤µ¤ģ¤æ¤Č¤”¢Į°µ½čĶżĮõĆÖ¤¬³ŗ„¢„É„ģ„¹¤Ė“š¤Å¤¤¤ĘĮ°µĢæĪį”¢Į°µĄ©øę¾šŹó¤ā¤·¤Æ¤ĻĪĮ¶ā¾šŹó”¢¤Ž¤æ¤ĻĮ°µČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±”¤£²¤Ž¤æ¤Ļ£³µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£¶”Ū Į°µĄ©øę¶É¤¬”¢Į°µ°øĄč¤ņ»Ų¼Ø¤¹¤ė¤æ¤į¤Ī”¢ĶųĶŃ¼Ō¤ā¤·¤Æ¤Ļ°øĄčĆĻÅĄ¤ņ°ģµĮÅŖ¤Ė¼±ŹĢ¤·ĘĄ¤ė¾šŹó¤¬ĘžĪĻ¤µ¤ģ¤æ¤Č¤”¢³ŗ¾šŹó¤ņĮ°µ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤·¤Ę”¢Į°µ½čĶżĮõĆÖ¤ĖĶæ¤Ø”¢³ŗŹŃ“¹¤Ė¼ŗĒŌ¤·¤æ¤Č¤¤Ė¤Ļ„؄锼¤Č¤·¤Ę„؄锼„į„Ć„»”¼„ø¤ņĶųĶŃ¼Ō¤Ėɽ¼Ø¤¹¤ėµ”Ē½¤ņ¤ā¤Ć¤æ„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤ņ¤µ¤é¤ĖČ÷¤Ø¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£µµŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£·”Ū Į°µ„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤¬”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃ¼ŌĀ¦¤«¤éĮ°µ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬Ķæ¤Ø¤é¤ģ¤æ¤Č¤”¢³ŗ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņ½čĶżĮõĆÖ¤ĖĶæ¤Ø¤ė¤Č¤Č¤ā¤Ė”¢³ŗ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņ”¢Į°µĶųĶŃ¼Ō¤ā¤·¤Æ¤Ļ°øĄčĆĻÅĄ¤ņ°ģµĮÅŖ¤Ė¼±ŹĢ¤·ĘĄ¤ė¾šŹó¤ĖŹŃ“¹¤·¤ĘĶųĶŃ¼Ō¤Ėɽ¼Ø¤·”¢³ŗŹŃ“¹¤Ė¼ŗĒŌ¤·¤æ¤Č¤¤Ė¤Ļ„؄锼„į„Ć„»”¼„ø¤ņĶųĶŃ¼Ō¤Ėɽ¼Ø¤¹¤ėµ”Ē½¤ņ¤µ¤é¤ĖĶ¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£¶µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£ø”Ū Į°µĄ©øę¶É¤¬”¢ĘĆÄź¤Īæō»ś¤ā¤·¤Æ¤Ļµ¹ę”¢¤Ž¤æ¤ĻĘĆÄź¤ĪŹĀ¤Ó¤ņ¤·¤æĻ¢Ā³¤¹¤ėæō»ś¤ā¤·¤Æ¤Ļµ¹ę¤Ė¤½¤ģ¤¾¤ģ¶čĄŚ¤ź¤ā¤·¤Æ¤ĻĘĆÄźĄ©øę¤Ī°ÕĢ£¤¬Äź¤į¤é¤ģ¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤ā¤·¤Æ¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤¹¤Ł¤¼±ŹĢ¾šŹó¤ņøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃ¼ŌĀ¦¤«¤é¼õ¤±¼č¤ź”¢¼õ¤±¼č¤Ć¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤ā¤·¤Æ¤Ļ¼±ŹĢ¾šŹó¤ņ²ņĄĻ¤·”¢³ŗ²ņĄĻ·ė²Ģ¤Ė±ž¤ø¤ĘĮ°µ„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤ĖĀŠ¤·¤Ę£Ć£Į£Ō£Ó„¢„É„ģ„¹ĘžĪĻ“°Ī»”¢ĘžĪĻĀĒ¤ĮĄŚ¤ź¤ā¤·¤Æ¤ĻÄūĄµ¤ņ»Ų¼Ø¤¹¤ė¤«”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤ā¤·¤Æ¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤¹¤Ł¤¾šŹó¤Ē¤¢¤ė¤³¤Č¤ņÅĮ¤Ø¤ėµ”Ē½¤ņ¤ā¤Ć¤æ„¢„É„ģ„¹²ņĄĻ¼źĆŹ¤ņ¤µ¤é¤ĖČ÷¤Ø¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£¶¤Ž¤æ¤Ļ£·µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£¹”Ū Į°µĄ©øę¶É¤¬”¢Į°µ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ē¤¢¤Ć¤Ę”¢
³ŗ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ī¼č¤źĘĄ¤ė¶õ“ÖĆę¤ņĻ¢Ā³ÅŖ¤Ė»ČĶѤ»¤ŗ¶õ“Ö¤Ī°ģÉō¤Ī¤ß¤ņĪ„»¶ÅŖ¤Ė»ČĶѤ·¤Ę¤¤¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņ”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃ¼ŌĀ¦¤«¤é¼õ¤±¼č¤ź”¢³ŗ¼õ¤±¼č¤Ć¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ī°ģÉō¤¬øķ¤Ć¤Ę¤¤¤ė¤Č¤”¢°ģÉō¤¬·ē¤±¤æ¤Č¤”¢¤ā¤·¤Æ¤ĻĶ¾·×¤ŹÉōŹ¬¤¬ÉÕ²Ć¤µ¤ģ¤Ę¤¤¤ė¤Č¤¤Ė„؄锼„į„Ć„»”¼„ø¤ņĶųĶŃ¼Ō¤Ėɽ¼Ø¤¹¤ėµ”Ē½¤ņ»ż¤Ć¤æ„¢„É„ģ„¹É½¼Ø¼źĆŹ¤ņ¤µ¤é¤ĖČ÷¤Ø¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£µµŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£±£°”Ū Į°µøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤¬Į°µČĀĮ÷ĀŠ¾Ż¤Č¤·¤ĘæĶ“Ö¤ņ¤āČĀĮ÷ĀŠ¾Ż¤Č¤¹¤ė„·„¹„Ę„ą¤Ē¤¢¤ź”¢Į°µ½čĶżĮõĆÖ¤¬³ŗøų½°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃ¼Ō¤Č¤·¤Ę¤ĪæĶ“Ö¤«¤é”¢¼«øŹ¤ĪĶ¢Į÷¤ņ»Ų¼Ø¤¹¤ė殹ę¤ņ¼õ¤±¼č¤ź”¢³ŗæĶ“Ö¤Ī¤æ¤į¤Ė²ĆĀ®ÅŁ”¢Ā®ÅŁ”¢ÄĢ²į¶č“Ö¤Ī¼ļŹĢ¤Ž¤æ¤Ļ»ž“Ö¤ņ¹ĶĪø¤·¤Ę”¢Į°µĢæĪį”¢Į°µĄ©øę¾šŹó¤ā¤·¤Æ¤ĻĪĮ¶ā¾šŹó”¢¤Ž¤æ¤ĻČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±”¤£²¤Ž¤æ¤Ļ£³µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£±£±”Ū Į°µČĀĮ÷ĀŠ¾Ż¤Č¤·¤Ę¤ĪæĶ“Ö¤ņÅė¾č¤µ¤»¤ėĀę¼Ö¤¬”¢³ŗĀę¼Ö¤ĖÅė¾č¤·¤ææĶ“Ö¤¬¹ŌĄčŹŃ¹¹”¢°ģ»žÄä»ß¤ā¤·¤Æ¤ĻŗĘ½ŠČƤĪ»Ų¼Ø¤ņĶæ¤Ø¤ė¤æ¤į¤Ī»Ų¼Ø¼źĆŹ¤ņČ÷¤Ø”¢³ŗ»Ų¼Ø¼źĆŹ¤«¤é¤Ī»Ų¼Ø¤Ė±ž¤ø¤ĘĮ°µ½čĶżĮõĆÖ¤¬Į°µĢæĪį”¢Į°µĄ©øę¾šŹó¤ā¤·¤Æ¤ĻĪĮ¶ā¾šŹó”¢¤Ž¤æ¤ĻČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±£°µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£±£²”Ū Į°µĀę¼Ö¤ā¤·¤Æ¤ĻĮ°µČĀĮ÷ĀŠ¾Ż¤ņ¼żĶʤ¹¤ėĶĘ“ļ¤¬”¢ČĀĮ÷¤Ī¤æ¤į¤Ī¾šŹó¤ņɽ¼Ø¤ā¤·¤Æ¤ĻĘāĀ¢¤¹¤ė„æ„°¤ņČ÷¤Ø”¢¤Ž¤æĮ°µČĀĮ÷Ļ©¾å¤Ė”¢³ŗ„æ„°¤ņĘÉ¤ß¼č¤ź”¢³ŗ„æ„°¤ĪĘāĶʤņĮ°µ½čĶżĮõĆÖ¤ĖĮ÷¤ė„æ„°ĘÉ¤ß¼č¤ź¼źĆŹ¤ņČ÷¤Ø”¢³ŗ½čĶżĮõĆÖ¤¬³ŗ„æ„°ĘÉ¤ß¼č¤ź¼źĆŹ¤Ė¤č¤Ć¤ĘĘɤ߼č¤é¤ģ¤æ„æ„°¤ĪĘāĶʤĖ±ž¤ø¤Ę”¢Į°µĢæĪį”¢Į°µĄ©øę¾šŹó¤ā¤·¤Æ¤ĻĪĮ¶ā¾šŹó”¢¤Ž¤æ¤ĻČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±”¤£²¤Ž¤æ¤Ļ£³µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£±£³”Ū Į°µČĀĮ÷Ļ©¤¬”¢Į°µČĀĮ÷ĀŠ¾Ż¤ņÅėŗܤ·¤æ¼«ĮöĒ½ĪĻ¤Ī¤Ź¤¤ĶĘ“ļ¤ņ”¢ŹŖĶżÅŖµ”¹½¤Ė¤č¤źČĀĮ÷¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±”¤£²¤Ž¤æ¤Ļ£³µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É”£
”ŚĄĮµį¹ą£±£“”Ū „Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢Āę¼Ö¤Ė¤č¤źČĀĮ÷ĀŠ¾Ż¤ņ»ŲÄź¤µ¤ģ¤æ°øĄč¤ĖČĀĮ÷¤¹¤ė„·„¹„Ę„ą¤Ē¤¢¤Ć¤Ę”¢
³ŗ„·„¹„Ę„ąĘā¤ĪČĀĮ÷¤ņĄ©øę¤¹¤ėĄ©øę¶É¤ņĶ¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤¤¤Ę”¢Į°µĀę¼Ö¤«¤é¤Ī¼č¤ź³°¤·¾õĀÖ¤ĒĮ°µČĀĮ÷ĀŠ¾Ż¤Ī½Š¤·Ęž¤ģ¤Ī¤æ¤į¤Ė³«ŹÄ¤Ē¤”¢¤«¤Ä”¢ŹÄŗæ¾õĀÖ¤ĒĀę¼Ö¤Ė¼č¤źÉÕ¤±¤é¤ģ¤ė¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņČ÷¤Ø¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą”£
”ŚĄĮµį¹ą£±£µ”Ū Į°µøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ąĘā¤Ē”¢Į°µČĀĮ÷ĀŠ¾Ż¤Ī½ŠČÆĆĻÅĄ”¢ÅžĆåĆĻÅĄ¤ā¤·¤Æ¤ĻĆę·ŃĆĻÅĄ¤Č¤Ź¤źĘĄ¤ėĆĻÅĄ¤ĖČ÷¤Ø¤é¤ģ¤ė„攼„ß„Ź„ė¤ĖÅžĆ夷¤æĀę¼Ö¤ĖĀŠ¤·¤Ę”¢Į°µ¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņ¼«Ę°ÅŖ¤Ė¼č¤źÉÕ¤±”¢¤Ž¤æ¤Ļ¼č¤ź³°¤¹ĶĘ“ļ¼č¤źÉÕ¤±”æ¼č¤ź³°¤·¼źĆŹ¤ņČ÷¤Ø¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±£“µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą”£
”ŚĄĮµį¹ą£±£¶”Ū Į°µøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĖĄÜĀ³¤µ¤ģ”¢Į°µ¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤¬Č÷Ćߤµ¤ģ¤Ę¤¤¤ėĶĘ“ļ„×”¼„ė¤ņ¤µ¤é¤ĖČ÷¤Ø”¢³ŗøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃ¼Ō¤«¤é¤Ī»Ų¼Ø¤Ė±ž¤ø¤Ę”¢Į°µĄ©øę¶É¤¬”¢¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¼«ĀĪ¤Ī³ŗĶųĶŃ¼ŌĀ¦¤Ī„攼„ß„Ź„ė¤Ų¤ĪČĀĮ÷¤Ī¤æ¤į¤Ė”¢³ŗĶųĶŃ¼Ō¤ĪĶ×µį¤Ė¹ēĆפ¹¤ė¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņ³ŗĶĘ“ļ„×”¼„ėĘā¤ĪĶĘ“ļ·²”¢¤Ž¤æ¤Ļ¤¹¤Ē¤ĖĀę¼Ö¤Ė¼č¤źÉÕ¤±¤é¤ģ¤Ę¤¤¤ėĶĘ“ļ·²¤ĪĆ꤫¤éø«¤Ä¤±”¢³ŗø«¤Ä¤±¤é¤ģ¤æ³ŗĶĘ“ļ¤ĪĶųĶŃ¼Ō„攼„ß„Ź„ė¤Ų¤ĪČĀĮ÷¤ņĄ©øę¤¹¤ė
¤³¤Č¤ņĘĆħ¤Č¤¹¤ėĄĮµį¹ą£±£“µŗܤĪøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą”£
”ŚĄĮµį¹ą£±£·”Ū „·„¹„Ę„ąĘā¤ĒĆĻÅĄ¤ņ°ģµĮÅŖ¤Ė¼±ŹĢ¤¹¤ė¤æ¤į¤Ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņĶѤ¤¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĄ©øę¶É¤Ė¤Ŗ¤¤¤Ę»ČĶѤµ¤ģ¤ėµĻæĒŽĀĪ¤Ē¤¢¤Ć¤Ę”¢
Į°µ£Ć£Į£Ō£Ó„¢„É„ģ„¹Ęā¤Ē¶čĄŚ¤źµ¹ę¤Ė¤č¤Ć¤Ę¶čĄŚ¤é¤ģ¤Ę¤¤¤ėŹ£æō¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĆĶ¤ņĘɤ߼č¤ė„¹„ʄƄפȔ¢
³ŗ£Ć£Į£Ō£Ó„¢„É„ģ„¹Ęā¤ĖĘĆÄź¤Īµ¹ęĪó¤Č¤·¤Ę¤ĪĄ©øę„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤Č¤¤Ė”¢³ŗĄ©øę„³”¼„ɤĖĀŠ±ž¤¹¤ėĘĆÄź¤Ī½čĶż¤ņ¹Ō¤¦„¹„ʄƄפȤņ·×»»µ”¤Ė¼Ā¹Ō¤µ¤»¤ė„ׄķ„°„é„ą¤ņ³ŹĒ¼¤·¤æ·×»»µ”Ęɤ߽Š¤·²ÄĒ½µĻæĒŽĀĪ”£
”ŚĄĮµį¹ą£±£ø”Ū øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É¤Ē»ČĶѤµ¤ģ¤ėµĻæĒŽĀĪ¤Ē¤¢¤Ć¤Ę”¢
ĶųĶŃ¼Ō¤«¤éĘžĪĻ¤µ¤ģ¤ėČĀĮ÷»Ų¼Ø殹ę¤ņ¼õ¤±¼č¤ė„¹„ʄƄפȔ¢
Į°µøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ąĘā¤ĪČĀĮ÷Ļ©¤ČĀę¼Ö¤ņĄ©øę¤¹¤ė„¹„ʄƄפȔ¢
ČĀĮ÷“°Ī»æ®¹ę¤ņ„攼„ß„Ź„ė¤«¤é¼õ¤±¼č¤ė„¹„ʄƄפȔ¢
Į÷ĪĮ¤ā¤·¤Æ¤ĻČĀĮ÷ĀŠ¾ŻĀå¶ā¤ā¤·¤Æ¤Ļ¼źæōĪĮ¤ā¤·¤Æ¤ĻĄĒ¶ā¤ņħµį¤¹¤ėĢæĪį¤ņČƹŌ¤¹¤ė„¹„ʄƄפȔ¢
¤¢¤ė¤¤¤Ļ¤µ¤é¤ĖĀ¾¤ĪʱĶĶ¤Ī„Ķ„Ć„Č„ļ”¼„ƾõ¤ĪČĀĮ÷Ļ©¤ņĄ©øę¤¹¤ė„¹„ʄƄפȤņ·×»»µ”¤Ė¼Ā¹Ō¤»¤»¤ė„ׄķ„°„é„ą¤ņ³ŹĒ¼¤·¤æ·×»»µ”Ęɤ߽Š¤·²ÄĒ½µĻæĒŽĀĪ”£
”ŚČÆĢĄ¤Ī¾ÜŗŁ¤ŹĄāĢĄ”Ū
”Ś£°£°£°£±”Ū
”ŚČÆĢĄ¤ĪĀ°¤¹¤ėµ»½ŃŹ¬Ģī”ŪĖÜČÆĢĄ¤ĻŹŖÉŹ¤ĪĶ¢Į÷¤Ŗ¤č¤ÓĪĮ¶ā·čŗѤņ¼«Ę°ÅŖ¤Ė¹Ō¤¦ŹŖĪ®„·„¹„Ę„ą¤Ė·ø¤ź”¢¹¹¤Ė¾Ü¤·¤Æ¤ĻĪć¤Ø¤ŠĆĻĆę”¢ĆĻ¾å”¢æåĆę¤¢¤ė¤¤¤Ļ¶õĆę¤ĖÉߥߤµ¤ģ¤æČĀĮ÷µ”¹½¤ņ¼«Ę°Ą©øꤷ¤Ę”¢ŹŖÉŹ¤Ž¤æ¤ĻŹŖ¼Į¤Ź¤É¤ĪČĀĮ÷ĀŠ¾Ż¤ņ”¢½ŠČÆĆĻÅĄ¤«¤é°øĄčĆĻÅĄ¤Ž¤Ē¼«Ę°ČĀĮ÷¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė“Ų¤¹¤ė”£
”Ś£°£°£°£²”Ū
”Ś½¾Ķč¤Īµ»½Ń”ŪĄĪ¤«¤éĒĄ¶ČĄø»ŗÉŹ”¢æå»ŗ²Ć¹©ÉŹ”¢°įĪĮÉŹ”¢»Ø²ß”¢»ńŗą”¢¤Ŗ¤č¤Ó¹©¶ČĄ½ÉŹ¤Ź¤É¤ĪĶĶ”¹¤ŹŹŖÉŹ¤ņ”¢¹ńÅŚ”¢³¤”¢²ĻĄī”¢øŠ¾Ā¤Ź¤É¤ĖÅĻ¤Ć¤Ę±æČĀ¤¹¤ė¤³¤Č¤ĻĄø³č¤ņøž¾å¤µ¤»¤ė¤æ¤į¤ĖÉŌ²Ä·ē¤Ī¤ā¤Ī¤Ē¤¢¤ź”¢¶įĒƤĪ„Ž„¹„³„ߤ䄤„ó„攼„Ķ„Ć„Č”¢¤½¤ĪĀ¾¤Ī¾šŹó„Ķ„Ć„Č„ļ”¼„ƤĪČÆĆ£¤Ļ”¢øÄæĶ¤ä“ė¶Č¤ĪŹŖÉŹ±æČĀĶ×µį¤ĪĮżĀē¤ĖĒļ¼Ö¤ņ¤«¤±¤Ę¤¤¤ė”£
”Ś£°£°£°£³”Ū¤½¤Ī°ģŹż¤ĒŹŖÉŹ¤Ī±æČĀ¤Ė¤«¤«¤ėæĶ¼ź”¢ČńĶŃ”¢„Ø„Ķ„ė„®”¼¤¬ĮżĀē¤·”¢±æČĀĶѤĪ¼ÖĪ¾¤ä¹Ņ¶õµ”¤Ź¤É¤¬ČÆĄø¤¹¤ėĒ®¤ä²½³ŲŹŖ¼Į¤¬ĆĻµå“Ķ¤Ė°±Ę¶Į¤ņĶæ¤Ø”¢øņÄĢ½ĀĀŚ”¢øņÄĢ»öøĪ”¢Ę»Ļ©¤Ė¤č¤ė¼«Į³ĒĖ²õ¤Ź¤É¤¬æ¼¹ļ¤ŹĢäĀź¤Č¤Ź¤Ć¤Ę¤¤¤ė”£
”Ś£°£°£°£“”Ū¶įĒƤĒ¤Ļ”¢±æĶ¢¶Č¤Ė¤Ŗ¤¤¤ĘŹŖÉŹ¤ĪĆķŹøĘāĶʤ¬·×»»µ”¤ĖĘžĪĻ¤µ¤ģ¤ė¤Č”¢¤½¤Ī·×»»µ”¤¬æĶ“Ö¤ĖŹŖÉŹ¤Ī½Š²Ł¤ņ»Ų¼Ø¤¹¤ė„·„¹„Ę„ą¤¬ĶѤ¤¤é¤ģ¤Ę¤¤¤ė”£
””¤³¤Ī·×»»µ”¤ĖĀŠ¤·¤Ę”¢æĶ“Ö¤¬ŹŖÉŹ¤Ī±æČĀ¤ĪÅÓĆę¤Ī·č¤į¤é¤ģ¤æĆĻÅĄ¤Ē”¢¾šŹó„Ķ„Ć„Č„ļ”¼„ƤņĶѤ¤¤ĘŹŖÉŹ¤Ī±æČĀ¾õ¶·¤ņĘžĪĻ¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢ŹŖÉŹ¤¬ŗ£¤É¤³¤ĖĀøŗߤ¹¤ė¤«¤¬Ē§¼±¤µ¤ģ”¢½¾¤Ć¤Ę²Ł¼ē¤¬¼«Ź¬¤ĪČÆĮ÷¤·¤æ²ŁŹŖ¤Īø½ŗß°ĢĆÖ¤ņĢ䤤¹ē¤ļ¤»¤ė¤Č”¢·×»»µ”¤Ļ¤½¤Ī°ĢĆÖ¤ņ²óÅś¤¹¤ė¤³¤Č¤¬¤Ē¤”¢²ŁŹŖ¤ĪÄɥדÉĶż¤¬²ÄĒ½¤Č¤Ź¤ė”£
”Ś£°£°£°£µ”Ū¤Ž¤æ±æĶ¢¶Č¤Ė¤Ŗ¤¤¤Ę”¢Ź£æō¤ĪĘĻ¤±Ąč¤ņŗĒ¤āĆ»¤¤·ŠĻ©¤Ē²ó¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢»ž“Ö¤äĒ³ĪĮ¤ņĄįĢ󤹤ė»ī¤ß¤ā¹Ō¤ļ¤ģ¤Ę¤Ŗ¤ź”¢ĒŪĮ÷·×²čĢäĀź¤Č¤·¤ĘŗĒŬ·ŠĻ©¤Ī·×»»¤ņ·×»»µ”¤Ė¤č¤Ć¤Ę¼Ā¹Ō¤¹¤ė¤³¤Č¤ā¹Ō¤ļ¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£°£¶”Ū¹¹¤ĖŗĒ¶į¤Ē¤Ļ”¢¾šŹó„Ķ„Ć„Č„ļ”¼„ƤĪĆę¤Ī²¾ĮŪ¤ĪŹŹŽ¤Ė¤Ŗ¤¤¤Ę”¢¾¦ÉŹ¤ņ²čĮü¤Ź¤É¤ņĶѤ¤¤Ę¾ĆČń¼Ō¤Ė¾Ņ²š¤·”¢ÅÅ»ŅÅŖ¤ĖĆķŹø¤ņ¼č¤Ć¤Ę±Ä¶Č¤¹¤ė²¾ĮŪ¾¦Å¹³¹¤Īµ»½Ń¤ā³ĪĪؤµ¤ģ¤Ä¤Ä¤¢¤ź”¢²ßŹ¾¤ä»ęŹ¾¤Ź¤É¤ņ»Č¤ļ¤ŗ”¢ÅÅ»ŅÅŖ¤ŹŹżĖ”¤ĒĀå¶ā¤Ī»ŁŹ§¤¤¤ņ¹Ō¤¦¤³¤Č¤¬¤Ē¤¤ėÅÅ»Ņ„Ž„Ķ”¼¤ņĶѤ¤¤æ„·„¹„Ę„ą¤ā¼ĀĶŃ²½¤µ¤ģ¤Ä¤Ä¤¢¤ė”£
”Ś£°£°£°£·”Ū
”ŚČÆĢĄ¤¬²ņ·č¤·¤č¤¦¤Č¤¹¤ė²ŻĀź”Ū°Ź¾å¤Ī¤č¤¦¤Ź»žĀåÅŖĒŲ·Ź¤Ė“Õ¤ß¤Ę”¢ĆĻ²¼”¦ĆĻɽ”¦ĆĻ¾å”¦æåĆꔦæå¾å¤Ž¤æ¤Ļ¶õ“Ö¤Ė„Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż¤Č¤·¤Ę¤ĪŹŖÉŹ¤ā¤·¤Æ¤ĻŹŖ¼Į¤ā¤·¤Æ¤Ļ²ßŹ¾¤ā¤·¤Æ¤Ļ»ęŹ¾¤ā¤·¤Æ¤Ļ¾šŹóµĻæĒŽĀĪ¤ā¤·¤Æ¤ĻĄøŹŖ¤ņ”¢¤Ž¤æ¤ĻŹŖÉŹ¤ā¤·¤Æ¤Ļ²ßŹ¾¤ā¤·¤Æ¤Ļ»ęŹ¾¤ā¤·¤Æ¤Ļ¾šŹóµĻæĒŽĀĪ¤ā¤·¤Æ¤ĻĄøŹŖ¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ā¤·¤Æ¤ĻĀę¼Ö¤ņ”¢½ŠČÆĆĻÅĄ¤«¤é°øĄčĆĻÅĄ¤Ž¤Ē¼«Ę°ČĀĮ÷¤·”¢¤¢¤ė¤¤¤Ļ¹¹¤ĖŹŖÉŹĀå¶ā”¢¤Ž¤æ¤ĻĮ÷ĪĮ¤ā¤·¤Æ¤Ļæ¶ĀŲ¼źæōĪĮ¤ā¤·¤Æ¤ĻĄĒ¶ā¤ņ¼«Ę°·čŗѤ¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ī¹½ĆŪ¤¬Ė¾¤Ž¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£°£ø”Ū¤³¤Ī¤č¤¦¤Źøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĖĪą»÷¤·¤æ„·„¹„Ę„ą¤Ī¹½ĮŪ”¢¤Ž¤æ¤Ļ¤½¤Ī°ģÉō¤ņĢ“¤Č¤·¤Ęµ½Ņ¤·¤æŹøø„¤Č¤·¤Ę”¢¼”¤ĪŹøø„£±”ĮŹøø„£¹¤¬¤¢¤ė”£
Źøø„£±”Ė ·śĄß¾ŹÅŌ»Ō¶É“Ę½¤”§¤ę¤Č¤ź¼Ņ²ń¤Č³¹¤Å¤Æ¤źĘ»¤Å¤Æ¤ź”¢ĀēĄ®½ŠČĒ¼Ņ”Ź£±£¹£¹£²”Ė”£
”Ś£°£°£°£¹”ŪŹøø„£²”Ė ÅŌ»Ō“ĶĢäĀźø¦µę²ń”Ź¼ÆÅē ĢŠ”¢¹õÅÄ ¾»¹¬¤Ū¤«”Ė”§ĆĻ²¼ŹŖĪ®„·„¹„Ę„ąĆĻ¶čĘāæ·ŹŖĪ®„·„¹„Ę„ą”Ö„ķ„ø„¹„Ę„£„Æ„¹£Ģ£Į£Ī”×¹½ĮŪ”¢µ»ŹóĘ²½ŠČĒ”Ź£±£¹£¹£µ”Ė”£
”Ś£°£°£±£°”ŪŹøø„£³”Ė ĆĻ°čĘāŹŖ»ń½øĒŪĮ÷„·„¹„Ę„ąø¦µę²ń”§ŹæĄ®£·ĒÆÅŁŹó¹š½ń”Ź£±£¹£¹£¶”Ė”£
Źøø„£“”Ė Ĺ߷ ĶųÉ×”§ÅŌ»ŌĘāĆ¼ĖöŹŖĪ®²žĮ±¤Ī¤æ¤į¤Īæ·„·„¹„Ę„ą¤Ė¤Ä¤¤¤Ę”¢øņÄĢ¹©³Ų”¢Vol.30, No.5”Ź£±£¹£¹£µ”Ė”£
”Ś£°£°£±£±”ŪŹøø„£µ”Ė Ĺ߷ ĶųÉ×”¢Ä¹Ą„ ·Ć°ģĻŗ”¢¾”Ėō ŗŃ”§ĆĻ°čĘāŹŖ»ń½øĒŪĮ÷„·„¹„Ę„ą¤Ī³«ČÆ”¢ÅŌ»Ō¤ČøņÄĢ”¢No.38 ”Ź£±£¹£¹£¶”Ė”£
Źøø„£¶”Ė ·śĄß¾ŹĘ»Ļ©¶É”¢·śĄß¾ŹÅŚĢŚø¦µę½ź”¢”Źŗā”Ė¹ńÅŚ³«ČƵ»½Ńø¦µę„»„ó„攼”¢”Źŗā”ĖĘ»Ļ©æ·»ŗ¶Č³«ČƵ”¹½”§æ·ŹŖĪ®„·„¹„Ę„ą”¢„Ń„ó„Õ„ģ„Ć„ČŹøø„£·”Ė Ķ¹ĄÆ¾ŹĶ¹ĄÆø¦µę½źŹŌ”§„ķ„ø„¹„Ę„£„Æ„¹³×Ģ攢»°ÅĽŠČĒ²ń”Ź£±£¹£¹£“”Ė”£
”Ś£°£°£±£²”ŪŹøø„£ø”Ė ½ļŹż ·ņĘ󔢷ŖĪÓ ĄæĢ锧Ķ„Ž„ė„Į„į„Ē„£„¢¼Ņ²ń”¢¤Ė¤Ć¤«¤ó½ńĖ¼”Ź£±£¹£¹£“”Ė”£
Źøø„£¹”Ė ŗäĀ¼ ·ņ”§„³„ó„Ō„唼„æ¤Ī»žĀ壳 ÅÅĒ¾Ģ¤ĶčĻĄ „Č„ķ„ó¤ĪĄ¤µŖ”×”¢³ŃĄī½ńŹ”Ź£±£¹£ø£¹”Ė”£
”Ś£°£°£±£³”Ū¤·¤«¤·¤Ź¤¬¤é”¢Į°½Ņ¤Ī¤č¤¦¤Źøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ņ¹½ĆŪ¤¹¤ė¤æ¤į¤Ī¶ńĀĪÅŖ¤Źø¶Ķż¤äŹżĖ”¤¬”¢¤³¤Ī¤č¤¦¤ŹŹøø„¤Ē¤ĻĢĄ¤é¤«¤Ė¤µ¤ģ¤Ę¤¤¤Ź¤¤¤Č¤¤¤¦ĢäĀźÅĄ¤¬¤¢¤Ć¤æ”£
”Ś£°£°£±£“”ŪĖÜČÆĢĄ¤Ļ”¢¾å½Ņ¤ĪĢäĀźÅĄ¤Ė“դߔ¢Į°½Ņ¤Ī¤č¤¦¤Źøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ņ¹½ĆŪ¤¹¤ė¤æ¤į¤Ī¶ńĀĪÅŖø¶Ķż”¢ŹĀ¤Ó¤ĖŹżĖ”¤ņÄ󶔤¹¤ė¤³¤Č¤ņĢÜÅŖ¤Č¤¹¤ė”£
”Ś£°£°£±£µ”Ū
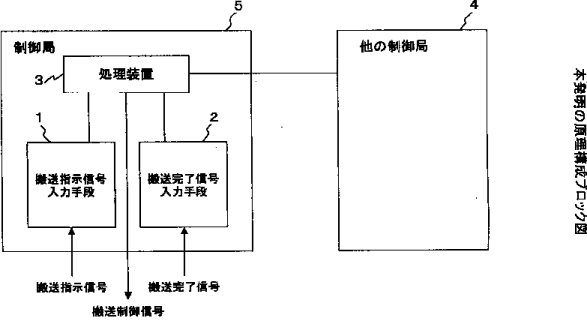
”Ś²ŻĀź¤ņ²ņ·č¤¹¤ė¤æ¤į¤Ī¼źĆŹ”Ū掣±¤ĻĖÜČÆĢĄ¤Īø¶Ķż¹½Ą®„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
掣±””ĖÜČÆĢĄ¤Īø¶Ķż¹½Ą®„Ö„ķ„Ć„ÆæŽ
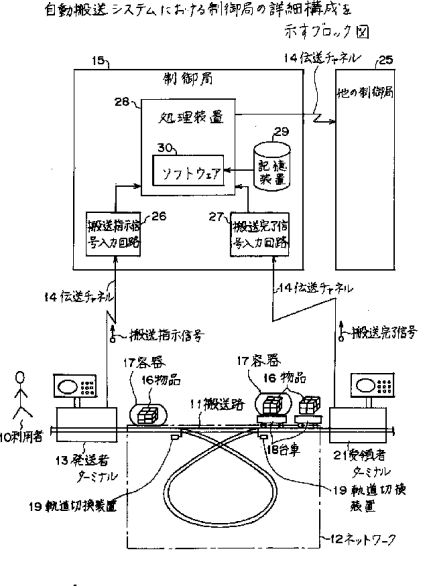
””Ę±æŽ¤ĻĆĻ²¼”¦ĆĻɽ”¦ĆĻ¾å”¦æåĆꔦæå¾å¤Ž¤æ¤Ļ¶õ“Ö¤Ė„Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż¤Č¤·¤Ę¤ĪŹŖÉŹ¤ā¤·¤Æ¤ĻŹŖ¼Į¤ā¤·¤Æ¤Ļ²ßŹ¾¤ā¤·¤Æ¤Ļ»ęŹ¾¤ā¤·¤Æ¤Ļ¾šŹóµĻæĒŽĀĪ¤ā¤·¤Æ¤ĻĄøŹŖ¤ņ”¢¤Ž¤æ¤ĻŹŖÉŹ¤ā¤·¤Æ¤ĻŹŖ¼Į¤ā¤·¤Æ¤Ļ²ßŹ¾¤ā¤·¤Æ¤Ļ»ęŹ¾¤ā¤·¤Æ¤Ļ¾šŹóµĻæĒŽĀĪ¤ā¤·¤Æ¤ĻĄøŹŖ¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ā¤·¤Æ¤ĻĀę¼Ö¤ņ”¢½ŠČÆĆĻÅĄ¤«¤é°øĄčĆĻÅĄ¤Ž¤Ē¼«Ę°ČĀĮ÷¤·”¢¤¢¤ė¤¤¤Ļ¹¹¤ĖŹŖÉŹĀå¶ā¤ā¤·¤Æ¤ĻĮ÷ĪĮ¤ā¤·¤Æ¤Ļæ¶ĀŲ¼źæōĪĮ¤ā¤·¤Æ¤ĻĄĒ¶ā¤ņ¼«Ę°·čŗѤ¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É£µ¤Ī¹½Ą®¤ņ¼Ø¤¹„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
”Ś£°£°£±£¶”Ū掣±¤Ė¤Ŗ¤¤¤ĘČĀĮ÷»Ų¼Ø殹ęĘžĪĻ¼źĆŹ£±¤Ļ”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃ¼Ō”¢Īć¤Ø¤ŠŹŖÉŹ¤ĪČÆĮ÷¼ŌĀ¦¤«¤éĘžĪĻ¤µ¤ģ¤ėČĀĮ÷»Ų¼Ø殹ę¤ņ¼õ¤±¼č¤ė¤ā¤Ī¤Ē¤¢¤ź”¢ČĀĮ÷“°Ī»æ®¹ęĘžĪĻ¼źĆŹ£²¤ĻĪć¤Ø¤ŠŹŖÉŹ¤ĪČĀĮ÷“°Ī»»žÅĄ¤Ē³°Éō”¢Īć¤Ø¤ŠŹŖÉŹ¤Ī¼õĪĪ¼ŌĀ¦¤«¤éĘžĪĻ¤µ¤ģ¤ėČĀĮ÷“°Ī»æ®¹ę¤ņ¼õ¤±¼č¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£°£±£·”Ū½čĶżĮõĆÖ£³¤Ļ”¢ČĀĮ÷»Ų¼Ø殹ęĘžĪĻ¼źĆŹ£±¤ČČĀĮ÷“°Ī»æ®¹ęĘžĪĻ¼źĆŹ£²¤Č¤ĖĄÜĀ³¤µ¤ģ”¢ČĀĮ÷Ļ©¤ČĶĘ“ļ¤ā¤·¤Æ¤ĻĀę¼Ö¤ĪĘ°ŗī¤ņĄ©øę¤¹¤ė¤æ¤į¤ĪČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė¤Č¶¦¤Ė”¢ČĀĮ÷»Ų¼Øæ®¹ę”¢ČĀĮ÷“°Ī»æ®¹ę”¢¤ā¤·¤Æ¤ĻČĀĮ÷Ą©øę殹ę¤ņøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĘāÉō¤ĪĀ¾¤ĪĄ©øę¶É£“¤Č¤Ī“Ö¤ĒĘž½ŠĪĻ¤¹¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£°£±£ø”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Ą©øę¶É£µ¤ĻČĀĮ÷„Ē”¼„æµ²±¼źĆŹ¤ņ¹¹¤ĖČ÷¤Ø¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””ČĀĮ÷„Ē”¼„æµ²±¼źĆŹ¤ĻČĀĮ÷ĀŠ¾Ż”¢Īć¤Ø¤ŠŹŖÉŹ¤Ī£±¤Ä°Ź¾å¤ĪĀ°Ą”¢¤Ŗ¤č¤Ó¾Æ¤Ź¤Æ¤Č¤āČĀĮ÷°øĄč¤ņ“Ž¤ąČĀĮ÷„Č„é„󄶄Ƅ·„ē„ó¤Ė“Ų¤¹¤ė£±¤Ä°Ź¾å¤ĪĀ°Ą¤ņµ²±¤¹¤ė¤ā¤Ī¤Ē¤¢¤ė”£
””¤½¤·¤Ę½čĶżĮõĆÖ£³¤Ļ”¢ČĀĮ÷„Ē”¼„æµ²±¼źĆŹ¤Ėµ²±¤µ¤ģ¤Ę¤¤¤ė¾šŹó¤Ė“š¤Å¤¤¤Ę”¢Į°½Ņ¤ĪČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė¤³¤Č¤Ė¤Ź¤ė”£
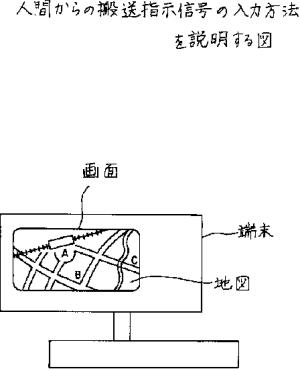
”Ś£°£°£±£¹”Ū¤Ž¤æĖÜČÆĢĄ¤Ī¼Ā»Ü·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Į°½Ņ¤ĪČĀĮ÷»Ų¼Ø殹ęĘā¤ĒĪć¤Ø¤ŠČĀĮ÷ĀŠ¾Ż¤Ī°øĄč¤ņĘĆÄź¤¹¤ė¤æ¤į¤Ī„ę„Ė”¼„ƤŹ„¢„É„ģ„¹”¢Īć¤Ø¤Š£Ć£Į£Ō£Ó„¢„É„ģ„¹(Common Automatic Transport System Address) ¤¬ĘžĪĻ¤µ¤ģ¤æ»ž”¢½čĶżĮõĆÖ£³¤¬¤½¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ė“š¤Å¤¤¤ĘČĀĮ÷Ą©øę殹ę¤ņ½ŠĪĻ¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£°”Ū¤³¤Ī¤č¤¦¤Ź¾ģ¹ē”¢Ą©øę¶É£µ¤ĻĪć¤Ø¤Š„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤ņ¹¹¤ĖČ÷¤Ø¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””¤³¤Ī„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤Ļ”¢Īć¤Ø¤ŠĶųĶŃ¼Ō¤«¤é£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĀå¤ļ¤ź¤Ė”¢ČĀĮ÷ĀŠ¾Ż¤Ī°øĄč¾šŹó¤Č¤·¤ĘÅÅĻĆČÖ¹ę”¢Ķ¹ŹŲČÖ¹ę¤Ź¤É¤Ī¾šŹó¤¬Ķæ¤Ø¤é¤ģ¤æ»ž¤Ė”¢¤½¤Ī°øĄč¾šŹó¤ņ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤·¤Ę½čĶżĮõĆÖ£³¤ĖĶæ¤Ø¤ė¤ā¤Ī¤Ē¤¢¤ź”¢¤½¤ĪŹŃ“¹¤Ė¼ŗĒŌ¤·¤æ»ž¤Ė¤Ļ„؄锼¤Č¤·¤Ę”¢„؄锼„į„Ć„»”¼„ø¤ņĶųĶŃ¼Ō¤Ėɽ¼Ø¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£±”Ū¤Ž¤æ¤³¤Ī¾ģ¹ē”¢ČĀĮ÷»Ų¼Ø殹ę¤ĻĶųĶŃ¼ŌĀ¦¤«¤é·×»»µ”„·„¹„Ę„ą”¢„¤„ó„攼„Ķ„Ć„Č”¢ÅÅĻĆĢÖ”¢ÅÅæ®ĢÖ”¢¤ā¤·¤Æ¤Ļ·×»»µ”„Ķ„Ć„Č„ļ”¼„Ƥņ²š¤·¤ĘĘžĪĻ¤µ¤ģ¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£²”Ū¹¹¤ĖĮ°½Ņ¤Ī„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤Ļ”¢ĶųĶŃ¼Ō¤«¤éČĀĮ÷»Ų¼Ø殹ę¤ĪĘāÉō¤Ē°øĄč¤Č¤·¤Ę¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬Ķæ¤Ø¤é¤ģ¤æ»ž”¢¤½¤Ī„¢„É„ģ„¹¤ņ½čĶżĮõĆÖ£³¤ĖĶæ¤Ø¤ė¤Č¶¦¤Ė”¢¤½¤Ī„¢„É„ģ„¹¤ņÅÅĻĆČÖ¹ę”¢Ķ¹ŹŲČÖ¹ę¤Ź¤É¤Ī¾šŹó¤ĖŹŃ“¹¤·¤ĘĶųĶŃ¼Ō¤Ėɽ¼Ø¤·”¢¤½¤ĪŹŃ“¹¤Ė¼ŗĒŌ¤·¤æ»ž¤Ė¤Ļ„؄锼„į„Ć„»”¼„ø¤ņĶųĶŃ¼Ō¤Ėɽ¼Ø¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£³”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Ą©øę¶É£µ¤Ļ„¢„É„ģ„¹²ņĄĻ¼źĆŹ¤ņ¹¹¤ĖČ÷¤Ø¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””¤³¤Ī„¢„É„ģ„¹²ņĄĻ¼źĆŹ¤ĻĘĆÄź¤Īæō»ś¤äµ¹ę”¢¤Ž¤æ¤ĻĘĆÄź¤ĪŹĀ¤Ó¤ĪĻ¢Ā³¤¹¤ėæō»ś¤ā¤·¤Æ¤Ļµ¹ę¤ĖĀŠ±ž¤·¤ĘĘĆÄźĄ©øę¤Ī°ÕĢ£¤¬Äź¤į¤é¤ģ¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņČĀĮ÷»Ų¼Ø殹ęĘžĪĻ¼źĆŹ¤«¤é¼õ¤±¼č¤Ć¤Ę”¢¤½¤Ī„¢„É„ģ„¹¤ņ²ņĄĻ¤·”¢„¢„É„ģ„¹ŹŃ“¹¼źĆŹ¤ĖĀŠ¤·¤Ę£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘžĪĻ“°Ī»”¢ĘžĪĻĀĒĄŚ¤ź”¢¤ā¤·¤Æ¤ĻÄūĄµ¤ņ»Ų¼Ø¤¹¤ė¤«”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤ā¤·¤Æ¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤¹¤Ł¤¾šŹó¤Ē¤¢¤ė¤³¤Č¤ņÅĮ¤Ø¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£°£²£“”Ū¹¹¤ĖĖÜČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Ą©øę¶É£µ¤Ļ¹¹¤Ė„¢„É„ģ„¹„Į„§„Ć„Æ¼źĆŹ¤ņČ÷¤Ø¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””¤³¤Ī„¢„É„ģ„¹„Į„§„Ć„Æ¼źĆŹ¤Ļ”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę”¢„¢„É„ģ„¹¤Ī¼č¤źĘĄ¤ė¶õ“ÖĆę¤ņĻ¢Ā³ÅŖ¤Ė»ČĶѤ·¤Ź¤¤„¢„É„ģ„¹¤Ē¤¢¤Ć¤Ę”¢
ÉōŹ¬ÅŖ¤Ź¶õ“Ö¤Ī¤ß¤¬»ČĶѤµ¤ģ¤Ę¤¤¤ė„¢„É„ģ„¹¤ņČĀĮ÷»Ų¼Ø殹ęĘžĪĻ¼źĆŹ£±¤«¤é¼õ¤±¼č¤ź”¢ĘžĪĻ¤µ¤ģ¤æ„¢„É„ģ„¹¤Ī°ģÉō¤¬øķ¤Ć¤Ę¤¤¤ė»ž”¢°ģÉō¤¬·ē¤±¤æ»ž”¢¤ā¤·¤Æ¤ĻĶ¾·×¤ŹÉōŹ¬¤¬ÉÕ²Ć¤µ¤ģ¤Ę¤¤¤ė»ž¤Ė”¢„؄锼„į„Ć„»”¼„ø¤ņĶųĶŃ¼Ō¤Ėɽ¼Ø¤¹¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£°£²£µ”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Īć¤Ø¤ŠŹŖÉŹ¤ņČĀĮ÷¤¹¤ėĀę¼Ö¤«¤é¤Ī¼č¤ź³°¤·¤¬²ÄĒ½¤ŹĶĘ“ļ¤ņČ÷¤Ø¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””¤³¤ĪĶĘ“ļ¤ĻĀę¼Ö¤«¤é¤Ī¼č¤ź³°¤·¾õĀÖ¤ĒČĀĮ÷ĀŠ¾Ż”¢Īć¤Ø¤ŠŹŖÉŹ¤Ī½Š¤·Ęž¤ģ¤Ī¤æ¤į¤Ė³«ŹÄ¤¹¤ė¤³¤Č¤¬¤Ē¤”¢ŹÄŗæ¾õĀÖ¤ĒĀę¼Ö¤Ė¼č¤źÉÕ¤±¤é¤ģ¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£°£²£¶”Ū¤³¤Ī¤č¤¦¤Ź¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņ»ČĶѤ¹¤ė¾ģ¹ē¤Ė¤Ļ”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ąĘā¤ĒČĀĮ÷ĀŠ¾Ż¤Č¤·¤Ę¤ĪĪć¤Ø¤ŠŹŖÉŹ¤Ī½ŠČÆĆĻÅĄ”¢ÅžĆåĆĻÅĄ¤ā¤·¤Æ¤ĻĆę·ŃĆĻÅĄ¤Č¤Ź¤źĘĄ¤ėĆĻÅĄ¤ĖČ÷¤Ø¤é¤ģ¤ė„攼„ß„Ź„ė¤Ė”¢Ą©øę¶É£µ¤ĪĄ©øę¤Ė¤č¤ź”¢¼«Ę°ÅŖ¤Ė¤½¤Ī„攼„ß„Ź„ė¤ĖÅžĆ夷¤æĀę¼Ö¤ĖĀŠ¤·¤Ę”¢Į°½Ņ¤Ī¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņ¼«Ę°ÅŖ¤Ė¼č¤źÉÕ¤±”¢¤Ž¤æ¤Ļ¼č¤ź³°¤¹ĶĘ“ļ¼č¤źÉÕ¤±”æ¼č¤ź³°¤·¼źĆŹ¤ņČ÷¤Ø¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£·”Ū¤Ž¤æ¤³¤Ī¤č¤¦¤Ź¾ģ¹ē¤Ė”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ąĘā¤ĖĮ°½Ņ¤Ī¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤¬„×”¼„ė¤µ¤ģ¤Ę¤¤¤ėĶĘ“ļ„×”¼„ė¤ņ¹¹¤ĖČ÷¤Ø”¢ĶųĶŃ¼Ō¤«¤é¤Ī»Ų¼Ø¤Ė±ž¤ø¤ĘĄ©øę¶É£µ¤¬”¢ĶųĶŃ¼Ō¤ĪĶ×µį¤Ė¹ēĆפ¹¤ė¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņ”¢¤½¤ĪĶĘ“ļ„×”¼„ėĘā¤ĪĶĘ“ļ”¢¤Ž¤æ¤Ļ¤¹¤Ē¤ĖĀę¼Ö¤Ė¼č¤źÉÕ¤±¤é¤ģ¤Ę¤¤¤ėĶĘ“ļ¤«¤éø«¤Ä¤±¤Ę”¢¤½¤ĪĶĘ“ļ¤ņĶųĶŃ¼ŌĀ¦„攼„ß„Ź„ė¤ŲČĀĮ÷¤¹¤ė¤æ¤į¤ĪĄ©øę¤ņ¹Ō¤¦¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£ø”Ū¼”¤ĖĖÜČÆĢĄ¤Ī¼Ā»Ü·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤¬ČĀĮ÷ĀŠ¾Ż¤Č¤·¤ĘæĶ“Ö¤ņ¤āĶ¢Į÷¤¹¤ė„·„¹„Ę„ą¤Ē¤¢¤Ć¤Ę”¢
Ą©øę¶É£µ¤¬¤½¤ĪæĶ“Ö¤«¤é¼«øŹ¤ĪĶ¢Į÷¤ņ»Ų¼Ø¤¹¤ė殹ę¤ņ¼õ¤±¼č¤Ć¤Ę”¢¤½¤ĪæĶ“Ö¤Ī¤æ¤į¤Ė²ĆĀ®ÅŁ”¢Ā®ÅŁ”¢ÄĢ²į¶č“Ö¤Ī¼ļŹĢ”¢»ž“Ö¤ņ¹ĶĪø¤·¤æČĀĮ÷Ą©øę¤ņ¼Ā¹Ō¤¹¤ė¤č¤¦¤Ė¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£²£¹”Ū¤³¤Ī¤č¤¦¤Ź¾ģ¹ē”¢æĶ“Ö¤ņĶ¢Į÷¤¹¤ė¤æ¤į¤ĪĀę¼Ö¤¬”¢Āę¼Ö¤ĖÅė¾č¤·¤ææĶ“Ö¤«¤éĶæ¤Ø¤é¤ģ¤ė¹ŌĄčŹŃ¹¹”¢°ģ»žÄä»ß”¢ŗĘ½ŠČƤĪ»Ų¼Ø¤ņ¼õ¤±¼č¤ė¤æ¤į¤Ī»Ų¼Ø¼źĆŹ¤ņČ÷¤Ø”¢Ą©øę¶É£µ¤¬¤½¤Ī»Ų¼Ø¼źĆŹ¤«¤é¤Ī»Ų¼Ø¤Ė±ž¤ø¤Ę”¢æĶ“Ö¤ĪČĀĮ÷Ą©øę¤ņ¼Ā¹Ō¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£³£°”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ąĘā¤ĪĀę¼Ö¤ā¤·¤Æ¤ĻĶĘ“ļ¤¬ČĀĮ÷ĀŠ¾Ż¤Ī°øĄč¤ņ¼Ø¤¹„æ„°¤ņČ÷¤Ø”¢¤«¤ÄČĀĮ÷Ļ©¾å¤Ė¤½¤Ī„æ„°¤ĪĘāĶʤņĘÉ¤ß¼č¤ź”¢¤½¤ĪĘāĶʤņĄ©øę¶É£µ¤ĖĮ÷¤ė„æ„°ĘÉ¤ß¼č¤ź¼źĆŹ¤ņČ÷¤Ø¤ė¤³¤Č¤Ė¤č¤ź”¢Ą©øę¶É£µ¤¬¤½¤Ī„æ„°ĘÉ¤ß¼č¤ź¼źĆŹ¤Ė¤č¤Ć¤ĘĘɤ߼č¤é¤ģ¤æ„æ„°¤ĪĘāĶʤĖ±ž¤ø¤ĘČĀĮ÷Ą©øę¤ņ¼Ā¹Ō¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£³£±”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Į°½Ņ¤ĪČĀĮ÷Ļ©¤¬ČĀĮ÷ĀŠ¾Ż¤ņ¼żĶʤ¹¤ė¼«ĮöĒ½ĪĻ¤Ī¤Ź¤¤ĶĘ“ļ¤ņ„ķ”¼„锢„Ł„ė„Č”¢„±”¼„Ö„ė”¢ČÄ”¢„Õ„Ć„Æ”¢„¢”¼„ą”¢„Į„§„¤„󔢻õ¼Ö”¢„·„唼„攢æäæŹĮõĆÖ”¢¶õµ¤°µ”¢µ¤ĀĪ°µ”¢æå°µ”¢Ģż°µ¤ā¤·¤Æ¤ĻŹŖĶżÅŖµ”¹½¤Ė¤č¤Ć¤Ę°øĄč¤ĖČĀĮ÷¤¹¤ė¤ā¤Ī¤Ē¤¢¤Ć¤Ę”¢
Ą©øę¶É£µ¤¬¤½¤Ī„ķ”¼„锢„Ł„ė„Č”¢„±”¼„Ö„ė”¢ČÄ”¢„Õ„Ć„Æ”¢„¢”¼„ą”¢„Į„§„¤„󔢻õ¼Ö”¢„·„唼„攢æäæŹĮõĆÖ”¢¶õµ¤°µ”¢µ¤ĀĪ°µ”¢æå°µ”¢Ģż°µ¤ā¤·¤Æ¤ĻŹŖĶżÅŖµ”¹½¤ņĄ©øę¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢ČĀĮ÷ĀŠ¾Ż¤ĪČĀĮ÷Ą©øę¤ņ¼Ā¹Ō¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£³£²”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Īć¤Ø¤ŠĄ©øę¶É£µ¤ĖĘžĪĻ¤µ¤ģ¤ėĮ°½Ņ¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘÉ¤ß¼č¤ź¤Ī¤æ¤į¤Ė”¢Īć¤Ø¤Š„Õ„ķ„Ć„Ō„£„Ē„£„¹„ƤŹ¤É¤ĪµĻæĒŽĀĪ¤ņ»ČĶѤ¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£°£³£³”Ū¤³¤ĪµĻæĒŽĀĪ¤Ļ”¢„·„¹„Ę„ąĘā¤ĒĒ¤°Õ¤ĪĆĻÅĄ¤ņ„ę„Ė”¼„ƤĖ¼±ŹĢ¤¹¤ė¤æ¤į¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬ĶѤ¤¤é¤ģ¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĄ©øę¶É¤Ė¤Ŗ¤¤¤Ę»ČĶѤµ¤ģ¤ė¤ā¤Ī¤Ē¤¢¤ź”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹Ęā¤Ē¶čĄŚ¤źæ®¹ę¤Ė¤č¤Ć¤Ę¶čĄŚ¤é¤ģ¤Ę¤¤¤ėŹ£æō¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĆĶ¤ņĘɤ߼č¤é¤»¤ėµ”Ē½¤Č”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹Ęā¤ĖĘĆÄź¤ĪŹĀ¤Ó¤ņ¤·¤æµ¹ę¤Č¤·¤Ę¤ĪĄ©øę„³”¼„ɤ¬ø½¤ģ¤æ»ž¤Ė”¢¤½¤ĪĄ©øę„³”¼„ɤĖĀŠ±ž¤¹¤ėĘĆÄź¤Ī½čĶż¤ņ¹Ō¤ļ¤»¤ėµ”Ē½¤Č¤ņ·×»»µ”¤Ė¼Ā¹Ō¤µ¤»¤ė„ׄķ„°„é„ą¤ņ³ŹĒ¼¤¹¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£°£³£“”ŪĖÜČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Īć¤Ø¤ŠĄ©øę¶É¤¬ČĀĮ÷»Ų¼Ø殹ę¤ņĘžĪĻ¤ĖĀŠ±ž¤·¤Ę”¢ČĀĮ÷·ŠĻ©¤ņ·×»»¤·¤Ęµ°Ę»ĄŚ“¹ĮõĆÖ¤ČĀę¼Ö¤ĖČĀĮ÷»Ų¼Ø殹ę¤ņĮ÷殤·”¢¤¢¤ė¤¤¤Ļ¤µ¤é¤Ė”¢Ą©øę¶É¤¬ČĀĮ÷“°Ī»æ®¹ę¤ĪĘžĪĻ¤ĖĀŠ¤·¤Ę”¢ĪĮ¶ā·čŗŃÉō¤ņµÆĘ°¤¹¤ėµ”Ē½¤ņ·×»»µ”¤Ė¼Ā¹Ō¤µ¤»¤ė¤æ¤į¤Ė”¢Īć¤Ø¤Š„Õ„ķ„Ć„Ō„£„Ē„£„¹„ƤŹ¤É¤ĪµĻæĒŽĀĪ¤ņ»ČĶѤ¹¤ė¤³¤Č¤¬¤Ē¤¤ė”£
”Ś£°£°£³£µ”Ū°Ź¾å¤Ī¤č¤¦¤ĖĖÜČÆĢĄ¤Ė¤č¤ģ¤Š”¢„Ķ„Ć„Č„ļ”¼„ƾõ¤ĖÉߥߤµ¤ģ¤æČĀĮ÷Ļ©¤Ė±č¤Ć¤Ę½ŠČÆĆĻÅĄ¤«¤é°øĄčĆĻÅĄ¤Ž¤ĒČĀĮ÷ĀŠ¾Ż¤ņ¼«Ę°ČĀĮ÷¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ņ¹½ĆŪ¤¹¤ė¤æ¤į¤Ī¶ńĀĪÅŖø¶Ķż”¢¤Ŗ¤č¤ÓŹżĖ”¤¬Ä󶔤µ¤ģ¤ė”£
”Ś£°£°£³£¶”Ū
”ŚČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ”Ū¤Ž¤ŗĖÜČÆĢĄ¤¬ĀŠ¾Ż¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ĪĶųĶŃĖ”¤Ė¤Ä¤¤¤Ę”¢¤½¤Ī³µĶפņĄāĢĄ¤¹¤ė”£
”Ś£°£°£³£·”Ū¤Ž¤ŗĶųĶŃ¼Ō¤Ļøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤ņĶųĶѤ¹¤ė¤æ¤į¤Ė”¢„·„¹„Ę„ą¤Ī³Ę¼ļ¤Ī»ÜĄß¤ņ±æĶѤ¹¤ė»ö¶Č¼Ō¤Č¤Ī“Ö¤ĒĶųĶŃ·ĄĢó¤ņ¹Ō¤¤”¢ĶųĶŃ¼ŌĀ¦¤ĖĄßĆÖ¤µ¤ģ¤ė„攼„ß„Ź„ė¤ä°ś¤¹ž¤ßĄž¤ĪĄßČ÷Čń”¢¹©»öČń¤Ź¤É¤ņ»ŁŹ§¤¦”£
”Ś£°£°£³£ø”ŪČĀĮ÷ĀŠ¾Ż”¢Īć¤Ø¤ŠŹŖÉŹ¤ĪČÆĮ÷¼Ō¤Ļ”¢„攼„ß„Ź„ė¤ĪĆ¼Ėö¤Ī²čĢĢ¤Ź¤É¤ņĶѤ¤¤ĘĄ©øę¶É¤ĖŹŖÉŹ¤ĪČĀĮ÷¾ņ·ļ¤ņÅĮ¤Ø¤ė”£
””ŹŖÉŹ¤Ī°øĄč¤Ļ”¢øå½Ņ¤Ī¤č¤¦¤Ė¼õĪĪ¼Ō¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņĶѤ¤¤Ę»Ų¼Ø¤¹¤ė”£
””ÅÅĻĆČÖ¹ę¤ä½»½ź¤«¤é¤ā£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤¹¤ė¤³¤Č¤¬²ÄĒ½¤Ē¤¢¤ė”£
””ČĀĮ÷·ŠĻ©¤¬·×²č¤µ¤ģ”¢ø«ĄŃĪĮ¶ā¤äČĀĮ÷¤ĖĶפ¹¤ė»ž“Ö¤Ź¤É¤¬¼Ø¤µ¤ģ¤ė”£
””ČÆĮ÷¤ņ°ĶĶź¤¹¤ė¤Č·ĄĢ󤬥®Ī©¤·”¢°Źø唢Į÷ĪĮ¤Ī·čŗѤ¬¹Ō¤ļ¤ģ¤ė”£
”Ś£°£°£³£¹”Ū·ĄĢ󤬥®Ī©¤¹¤ė¤Č”¢Ą©øę¶É¤Ė¤č¤Ć¤ĘŹŖÉŹ¤ĖŬ¤·¤æĶĘ“ļ¤ČĀę¼Ö¤¬³ä¤źÅö¤Ę¤é¤ģ”¢Īć¤Ø¤ŠĶĘ“ļ„×”¼„ėĘā¤ĪĶĘ“ļ¤¬Āę¼Ö¤ĖĄŃ¤Ž¤ģ¤ĘČĀĮ÷Ļ©”¢Īć¤Ø¤Šµ°Ę»¾å¤ņ°ÜĘ°¤·¤Ę”¢ČÆĮ÷¼ŌĀ¦¤Ī„攼„ß„Ź„ė¤ĖÅžĆ夹¤ė”£
””ČÆĮ÷¼Ō¤ĻĶĘ“ļ¤ĖŹŖÉŹ¤ņ¼żĒ¼¤·”¢ĶĘ“ļ¤ņŹÄŗ椷¤ĘĀę¼Ö¤Ė¼č¤źÉÕ¤±¤ė”£
””ĶĘ“ļ¤Ą¤±¤¬¤¹¤Ē¤Ė„攼„ß„Ź„ė¤ĖĀøŗߤ¹¤ė¾ģ¹ē¤Ė¤Ļ”¢¶õ¤ĪĀę¼Ö¤¬„攼„ß„Ź„ė¤ĖÅžĆ夷”¢ĶĘ“ļ¤¬¼«Ę°„Ž„¦„ó„Ȥµ¤ģ¤ĘĀę¼Ö¤¬½ŠČƤ¹¤ė”£
””ĶĘ“ļ¤ņ³°¤·¤ĘŹŻ“ɤ¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””³°¤ģ¤Ę¤¤¤ė“Ö¤Ī¤ßŹŻ¾ŚĪĮ¤ĪĶĀĀ÷¤¬É¬ĶפȤŹ¤ė¤Č¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”””£
”Ś£°£°£“£°”ŪĄ©øę¶É¤ĻĀę¼Ö¤ČĶĘ“ļ¤Ī¼±ŹĢ»Ņ¤ņĒ§¼±¤·¤Ę”¢Āę¼Ö¤ČĶĘ“ļ¤Ī„·„¹„Ę„ąĘā¤Ē¤Ī½źŗߤņĄµ³Ī¤Ė“ÉĶż¤¹¤ė”£
””ĶĘ“ļ”æĀę¼Ö¤Ī£É£Ä¤Ą¤±¤Ē¤¢¤ģ¤Š„Š”¼„³”¼„ɤņĶѤ¤¤Ę¤ā¤č¤¤¤¬”¢“ūĀø¤Ī„Š”¼„³”¼„ɤĄ¤±¤Ē¤ĻČĀĮ÷„Č„é„󄶄Ƅ·„ē„ó¤ņ„ę„Ė”¼„ƤĖĘĆÄź¤¹¤ė¤³¤Č¤¬¤Ē¤¤Ź¤¤¤æ¤į”¢ČóĄÜæØĘɤ߽ń¤²ÄĒ½¤ĪÅÅ»Ņ„æ„°¤ņĶĘ“ļ”æĀę¼Ö¤ĖĮõČ÷¤¹¤ė¤³¤Č¤Ė¤č¤ź”¢ČĀĮ÷£É£Ä”¢°øĄč¤½¤ĪĀ¾¤Ī¾šŹó¤ņĘɤ߽ń¤¤¹¤ė¤³¤Č¤¬¤Ē¤¤ė”£
””¤½¤ĪĘɤ߽ń¤¤Ė¤Ļ·ČĀÓĆ¼Ėö¤ņĶѤ¤¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””Āę¼Ö¤Ī„·„¹„Ę„ąĘā¤Ē¤Ī°ĢĆÖ¤ĻĄ©øę¶É¤Ė¤č¤Ć¤ĘĄ©øꤵ¤ģ”¢Āę¼Ö¤Ī¾”¼ź¤ŹĘ°¤¤ĻĶŽĄ©¤µ¤ģ¤ė”£
””ĶĘ“ļ¤äĀę¼Ö¤Ī„·„¹„Ę„ąĘā¤Ē¤Ī¤¹¤źĀŲ¤Ø¤ņĖɤ°¤æ¤į¤Ė”¢ĖÜæĶĒ§¾Śµ»½Ń¤¬ŹŖÉŹ¤Ė±žĶѤµ¤ģ”¢Ą©øę¶ÉĀŠĀę¼Ö”æĶĘ“ļ”æ„攼„ß„Ź„ė¤¬ĮźøߤĖĮź¼ź¤ņø”¾Ś¤Ē¤¤ė¤ā¤Ī¤Č¤¹¤ė”£
”Ś£°£°£“£±”ŪČĀĮ÷¤Ė¤¢¤æ¤Ć¤Ę¤Ļ”¢ŹŻø±”¢ŹÖÉŹ”¢¼č°ś¾ŚĢĄ¤Ź¤É¤Ī¤æ¤į¤Ė³«Č”¤äĘāĶĘ³ĪĒ§¤ņ¹Ō¤¦¼Ō¤¬»ŲÄź¤µ¤ģ¤Ę¤¤¤ė¾ģ¹ē¤Ė¤Ļ”¢¤½¤Ī»ŲÄź¤µ¤ģ¤Ę¤¤¤ė¼Ō¤ņ·ŠĶ³¤µ¤»¤ĘČĀĮ÷¤ņ¼Ā¹Ō¤¹¤ė”£
””ČĀĮ÷Ćę¤Ė½ĀĀŚ”¢¾ć³²”¢ŗŅ³²”¢¼õĪĪ¼Ō¤ĪÉŌŗß”¦°ÜĘ°”¢¼õ¤±¼č¤źµńČŻ”¦Āå¹Ō”¦øņĀå¤Ź¤É¤¬¤¢¤ģ¤Š”¢·ŠĻ©¤ĪĘ°ÅŖ¤ŹŹŃ¹¹¤¬¹Ō¤ļ¤ģ¤ė”£
””ÉŹ¼ĮŹŻ»ż¤Ź¤É¤Ī¤æ¤į¤ĖÅžĆå“üøĀ¤Ī»ž¹ļ¤¬Ē÷¤Ć¤æ¾ģ¹ē¤Ė¤Ļ»źµŽ°·¤¤”¢ŹÖÉŹ”¢ČÆĮ÷¼Ō»Ų¼ØĀŌ¤Į”¢ŹŻĪäĮŅøĖ¤Ų¤ĪĀŌČņ¤Ź¤É¤¬»Ų¼Ø¤µ¤ģ¤ė”£
”Ś£°£°£“£²”ŪŹŖÉŹ¤Ī¼õĪĪ¤Ė“Ų¤·¤Ę¤Ļ”¢¼õĪĪ¼ŌĀ¦¤Ī„攼„ß„Ź„ė¤ĖÅžĆ夷¤æĀę¼Ö¤Ļ³°¤ĒĀŌ¤æ¤µ¤ģ”¢ÅÅ»Ņ„į”¼„ė¤ĪÅžĆå¤ČʱĶĶ¤Ė”¢¼õĪĪ¼ŌĀ¦¤Ī„攼„ß„Ź„ė¤ĖĀę¼Ö¤ĪÅžĆ夬ĆĪ¤é¤µ¤ģ¤ė”£
””¼õĪĪ¼ŌĀ¦¤«¤é¤ĪŹŖÉŹ¤Ī¼õĪĪ»Ų¼Ø¤Ļ¤½¤Īø夤¤Ä¤Ē¤ā²ÄĒ½¤Č¤Ź¤ė”£
””¤½¤Ī»Ų¼Ø¤Ė±ž¤ø¤ĘĀę¼Ö¤¬¼õĪĪ¼ŌĀ¦¤Ī„攼„ß„Ź„ė¤ĖÅžĆ夹¤ė”£
””¼õĪĪ¼Ō¤Ų¤ĪĄ®¤źŗѤŽ¤·¤ņĖɤ°¤æ¤į¤Ė”¢¼õĪĪ¼Ō¤ĪĖÜæĶĒ§¾Ś¤¬Ą®øł¤·¤æøå¤ĖĶĘ“ļ¤Ī³«Č””泫¾ū¤¬²ÄĒ½¤Č¤Ź¤ė”£
””ČĀĮ÷ĀŠ¾Ż¤¬¾¦ÉŹ¤Ē¤¢¤ģ¤Š”¢Āå¶ā¤Ī²ó¼ż¤Ļ¤³¤Ī½Ö“Ö¤Ė¼Ā¹Ō¤µ¤ģ”¢ŹŖÉŹ¤ĪČÆĮ÷¼Ō¤ĖĀŠ¤¹¤ėČĀĮ÷“°Ī»ÄĢĆĪ¤¬Ą©øę¶É¤ņ²š¤·¤Ę¹Ō¤ļ¤ģ¤ė”£
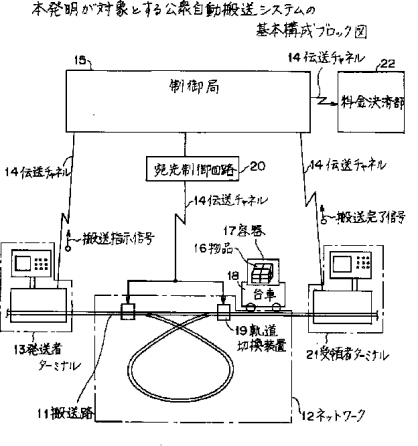
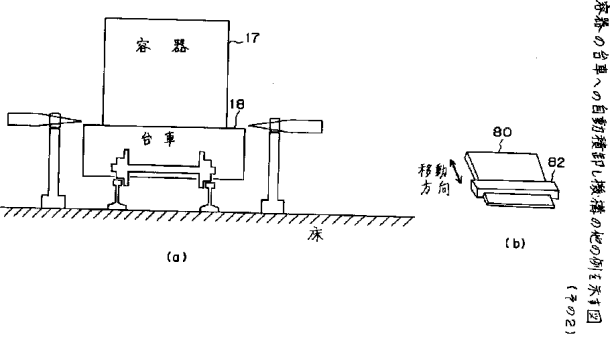
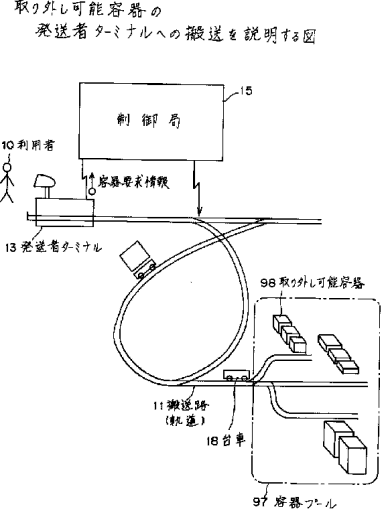
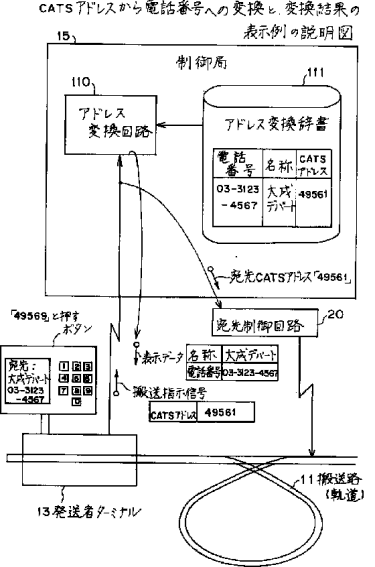
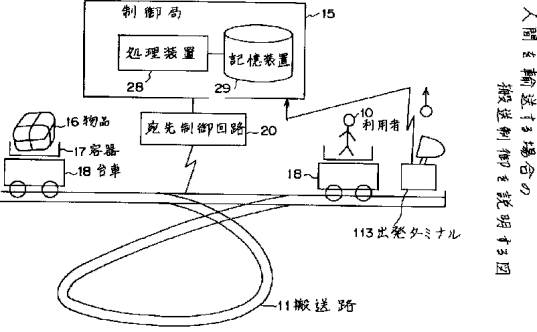
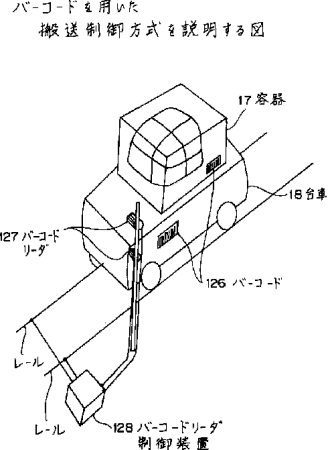
”Ś£°£°£“£³”ŪĀ³¤¤¤ĘĖÜČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ¤Ė¤Ä¤¤¤ĘæŽĢĢ¤ņ»²¾Č¤·¤Ę°Ź²¼¾ÜŗŁ¤ĖĄāĢĄ¤¹¤ė”£æŽ£²¤ĻĖÜČÆĢĄ¤¬ĀŠ¾Ż¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ī“šĖܹ½Ą®„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
掣²””ĖÜČÆĢĄ¤¬ĀŠ¾Ż¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ī“šĖܹ½Ą®„Ö„ķ„Ć„ÆæŽ
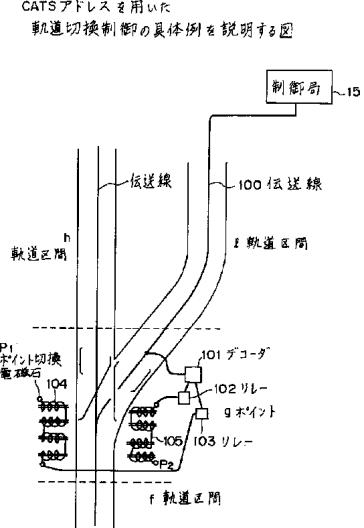
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘČĀĮ÷Ļ©£±£±¤Ļ„Ķ„Ć„Č„ļ”¼„Æ£±£²¤ņ¹½Ą®¤·¤Ę¤Ŗ¤ź”¢„Ķ„Ć„Č„ļ”¼„Æ£±£²¾å¤Ē¤ĪČĀĮ÷¤Ļ£±¤Ä¤ĪĄ©øę¶É£±£µ¤Ė¤č¤Ć¤ĘĄ©øꤵ¤ģ¤ė¤ā¤Ī¤Č¤¹¤ė”£
””„Ķ„Ć„Č„ļ”¼„Æ£±£²¤¬¹°č¤ĖÅĻ¤ė¾ģ¹ē¤Ė¤ĻĄ©øę¶É¤ņŹ£æōĄß¤±”¢³ĘĄ©øę¶É¤¬„Ķ„Ć„Č„ļ”¼„ƤĪ¤¦¤Į¤Ī°ģÉō¤ņŹ¬Ć“¤·¤Ę”¢øߤ¤¤Ė¶ØÄ“¤·¤Ź¤¬¤é„Ķ„Ć„Č„ļ”¼„ÆĮ“ĀĪ¤Ē¤ĪČĀĮ÷¤ņĄ©øę¤¹¤ė¤č¤¦¤Ė¤¹¤ė¤³¤Č¤āÅöĮ³²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£°£“£“”Ū掣²¤Ė¤Ŗ¤¤¤Ę”¢„Ķ„Ć„Č„ļ”¼„Æ£±£²¤ĖĄÜĀ³¤µ¤ģ¤æĀææō¤Ī„攼„ß„Ź„ė¤Ī¤¦¤Į¤Ē”¢Īć¤Ø¤ŠĶųĶŃ¼Ō¤¬ŹŖÉŹ¤ĪČĀĮ÷¤ņ°ĶĶź¤¹¤ėČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¤«¤é”¢ÅĮĮ÷„Į„ć„Ķ„ė£±£“¤ņ²š¤·¤ĘČĀĮ÷»Ų¼Øæ®¹ę¤¬Ą©øę¶É£±£µ¤ĖĶæ¤Ø¤é¤ģ¤ė¤Č”¢Ą©øę¶É£±£µ¤Ļ°øĄčĄ©øę²óĻ©£²£°”¢ÅĮĮ÷„Į„ć„Ķ„ė£±£“¤ņ²š¤·¤Ę„Ķ„Ć„Č„ļ”¼„Æ£±£²¤ĪĘāÉō¤Īµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹”¢¤Ŗ¤č¤ÓČĀĮ÷Ļ©£±£±¾å¤ĪĀę¼Ö£±£ø¤ņĄ©øꤷ¤Ę”¢Īć¤Ø¤ŠĶĘ“ļ£±£·¤ĖĘž¤ģ¤é¤ģ¤æŹŖÉŹ£±£¶¤¬Åėŗܤµ¤ģ¤æĀę¼Ö£±£ø¤ĪĘ°¤¤ņĄ©øꤷ”¢Āę¼Ö£±£ø¤ņŹŖÉŹ£±£¶¤Ī¼õĪĪ¼ŌĀ¦¤Ī¼õĪĪ¼Ō„攼„ß„Ź„ė£²£±¤Ž¤ĒČĀĮ÷¤¹¤ė”£
””¼õĪĪ¼Ō„攼„ß„Ź„ė£²£±¤ĻÅĮĮ÷„Į„ć„Ķ„ė£±£“¤ņ²š¤·¤ĘČĀĮ÷“°Ī»æ®¹ę¤ņĄ©øę¶É£±£µ¤ĖĶæ¤Ø”¢ČĀĮ÷¤Ļ“°Ī»¤¹¤ė”£
””ČĀĮ÷“°Ī»»žÅĄ¤Ē”¢ÅĮĮ÷„Į„ć„Ķ„ė£±£“¤ņ²š¤·¤ĘĄ©øę¶É£±£µ¤Ė¤č¤Ć¤ĘĪĮ¶ā·čŗŃÉō£²£²¤¬µÆĘ°¤µ¤ģ”¢ČĀĮ÷ĪĮ¶ā¤Ī·čŗѤ¬¹Ō¤ļ¤ģ¤ė”£
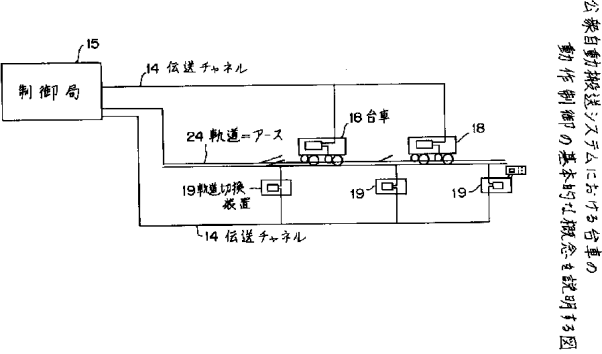
”Ś£°£°£“£µ”Ū掣³¤Ļ掣²¤Ė¤Ļ掼ؤµ¤ģ¤Ę¤¤¤Ź¤¤Āę¼Ö£±£ø¤ĪĘ°ŗīĄ©øꏿĖ”¤Ī“šĖÜÅŖ¤Ź³µĒ°æŽ¤Ē¤¢¤ė”£
掣³””øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĀę¼Ö¤ĪĘ°ŗīĄ©øę¤Ī“šĖÜÅŖ¤Ź³µĒ°¤ņĄāĢĄ¤¹¤ėæŽ
””Āę¼Ö£±£ø”¢µ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤Ļ”¢Īć¤Ø¤ŠĮ“¤ĘÅĮĮ÷„Į„ć„Ķ„ė£±£“¤ĖĄÜĀ³¤µ¤ģ”¢ÅĮĮ÷„Į„ć„Ķ„ė£±£“¤Čµ°Ę»”¢¤¹¤Ź¤ļ¤Į„¢”¼„¹£²£“¤Č¤Ī“Ö¤Ė²Ć¤Ø¤é¤ģ¤ė殹ę¤Ė¤č¤Ć¤ĘĄ©øꤵ¤ģ¤ė”£
””Āę¼Ö£±£ø¤Ŗ¤č¤Óµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤ĪĘāÉō¤Ė¤Ļ”¢ÅĮĮ÷„Į„ć„Ķ„ė£±£“¤Č„¢”¼„¹£²£“¤Č¤Ī“Ö¤Ė²Ć¤Ø¤é¤ģ¤ė殹ę¤Ė¤č¤Ć¤ĘĀę¼Ö£±£ø¤ĪĘ°¤”¢¤Ž¤æ¤Ļµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤Ė¤č¤ėµ°Ę»¤ĪĄŚ¤ź“¹¤Ø¤ņĄ©øę¤¹¤ė²óĻ©¤¬Č÷¤Ø¤é¤ģ¤ė”£
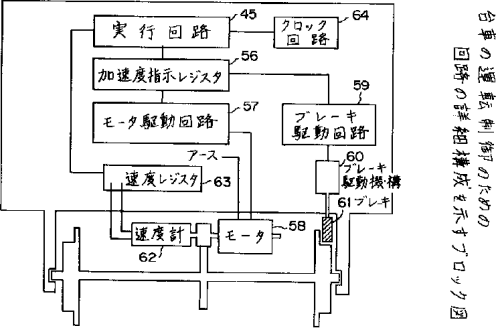
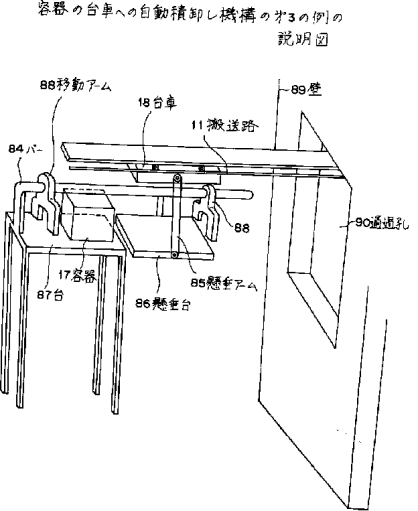
”Ś£°£°£“£¶”Ū掣“¤Ļ”¢æŽ£²¤Ė²Ć¤Ø¤Ę¹¹¤ĖĄ©øę¶É£±£µ¤Ī¾ÜŗŁ¹½Ą®¤ņ¼Ø¤·¤æøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ī¹½Ą®„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
掣“””¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėĄ©øę¶É¤Ī¾ÜŗŁ¹½Ą®¤ņ¼Ø¤¹„Ö„ķ„Ć„ÆæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘĄ©øę¶É£±£µ¤Ļ”¢Īć¤Ø¤ŠĶųĶŃ¼Ō£±£°¤«¤éČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¤ņ²š¤·¤ĘĘžĪĻ¤µ¤ģ¤ėČĀĮ÷»Ų¼Ø殹ę¤ņ¼õ¤±¼č¤ėČĀĮ÷»Ų¼Ø殹ęĘžĪĻ²óĻ©£²£¶”¢¼õĪĪ¼Ō„攼„ß„Ź„ė£²£±¤«¤é¤ĪČĀĮ÷“°Ī»æ®¹ę¤ņ¼õ¤±¼č¤ėČĀĮ÷“°Ī»æ®¹ęĘžĪĻ²óĻ©£²£·”¢£²¤Ä¤ĪĘžĪĻ²óĻ©£²£¶”¤£²£·¤«¤é¤Īæ®¹ę¤¬ĘžĪĻ¤µ¤ģ¤ė½čĶżĮõĆÖ£²£ø”¢½čĶżĮõĆÖ£²£ø¤ĖĀŠ¤¹¤ėµ²±ĮõĆÖ£²£¹¤«¤é¹½Ą®¤µ¤ģ¤Ę¤Ŗ¤ź”¢½čĶżĮõĆÖ£²£ø¤ĻĪć¤Ø¤Šµ²±ĮõĆÖ£²£¹Ęā¤Ė³ŹĒ¼¤µ¤ģ¤Ę¤¤¤ė„ׄķ„°„é„ą¤¬„ķ”¼„ɤµ¤ģ¤ė¤ā¤Ī¤Č¤·¤Ę¤Ī„½„Õ„Č„¦„§„¢£³£°¤ņČ÷¤Ø¤Ę¤¤¤ė”£
”Ś£°£°£“£·”Ū掣“¤Ė¤Ŗ¤¤¤Ę”¢Į°½Ņ¤Ī¤č¤¦¤Ė„Ķ„Ć„Č„ļ”¼„Æ£±£²¤ĻŹ£æō¤ĪĄ©øę¶É¤Ė¤č¤Ć¤ĘĄ©øꤵ¤ģ¤ė¤ā¤Ī¤Č¤·”¢Ą©øę¶É£±£µ¤ĻĀ¾¤ĪĄ©øę¶É£²£µ¤Č¤Ī“Ö¤ĒÅĮĮ÷„Į„ć„Ķ„ė£±£“¤ņ²š¤·¤Ę”¢É¬ĶפĖ±ž¤ø¤ĘČĀĮ÷»Ų¼Øæ®¹ę”¢ČĀĮ÷“°Ī»æ®¹ę”¢¤Ŗ¤č¤ÓĀę¼Ö£±£ø¤ĪĘ°¤¤Čµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤Ė¤č¤ėµ°Ę»ĄŚ“¹¤ņĄ©øę¤¹¤ė¤æ¤į¤ĪČĀĮ÷Ą©øę殹ę¤ņĘž½ŠĪĻ¤¹¤ė”£
””¤Ž¤æ掣²¤Ė¤Ŗ¤¤¤Ę¤ĻŹŖÉŹ£±£¶¤ĻĶĘ“ļ£±£·¤Ė¼żĒ¼¤µ¤ģ”¢Āę¼Ö£±£ø¤ĖÅėŗܤµ¤ģ¤ĘČĀĮ÷Ļ©£±£±¾å¤ņĘ°¤Æ¤ā¤Ī¤Č¤·¤æ¤¬”¢ŹŖÉŹ£±£¶¤¬¼żĒ¼¤µ¤ģ¤æŬÅö¤ŹĶĘ“ļ¤Ž¤æ¤Ļ„«„ׄ»„ė£±£·¤ņľĄÜ¤Ė”¢Īć¤Ø¤Šøå½Ņ¤¹¤ė¤č¤¦¤Ė„ķ”¼„é¤ä„Ł„ė„ȤĒ¹½Ą®¤µ¤ģ¤ėČĀĮ÷Ļ©£±£±¾å¤Ē°ÜĘ°¤µ¤»¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£°£“£ø”Ū掣µ¤Ļ掣²¤Ī°øĄčĄ©øę²óĻ©£²£°¤ĖĮźÅö¤·”¢„攼„ß„Ź„ė¤äµ°Ę»ĄŚ“¹ĮõĆÖ”¢¤½¤ĪĀ¾¤ĪĆĻ¾åĮõĆÖ”¢¤Ŗ¤č¤ÓĀę¼Ö¤ņĄ©øę¤¹¤ė¤æ¤į¤ĪĄ©øę殹ęĮ÷½Š²óĻ©¤Ī¹½Ą®Īć¤Ē¤¢¤ė”£
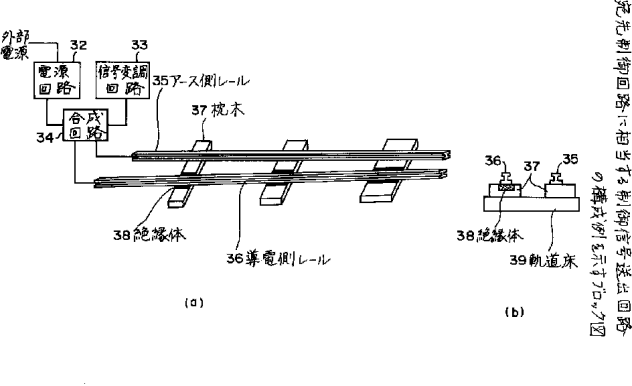
掣µ””°øĄčĄ©øę²óĻ©¤ĖĮźÅö¤¹¤ėĄ©øę殹ęĮ÷½Š²óĻ©¤Ī¹½Ą®Īć¤ņ¼Ø¤¹„Ö„ķ„Ć„ÆæŽ
””ʱæŽ(a) ¤Ė¤Ŗ¤¤¤Ę”¢³°ÉōÅÅø»¤ĖĄÜĀ³¤µ¤ģ¤æÅÅø»²óĻ©£³£²¤Č殹ęŹŃÄ“²óĻ©£³£³¤Ī½ŠĪĻ¤¬¹ēĄ®²óĻ©£³£“¤Ė¤č¤Ć¤Ę¹ēĄ®¤µ¤ģ”¢Ę³ÅÅĀ¦„ģ”¼„ė£³£¶¤Č„¢”¼„¹Ā¦„ģ”¼„ė£³£µ¤Č¤Ī“Ö¤Ė²Ć¤Ø¤é¤ģ¤ė”£
”Ś£°£°£“£¹”Ū(b) ¤Ė¼Ø¤¹¤č¤¦¤Ė”¢Ę³ÅÅĀ¦„ģ”¼„ė£³£¶¤ĻĖķĢŚ£³£·¤Č¤Ī“Ö¤ĪĄä±ļĀĪ£³£ø¤Ė¤č¤Ć¤ĘĄä±ļ¤µ¤ģ¤Ę¤Ŗ¤ź”¢°ģŹż„¢”¼„¹Ā¦„ģ”¼„ė£³£µ¤Ļ¤½¤Ī¤Ž¤ŽĖķĢŚ£³£·¤Ī¾å¤ĖĆÖ¤«¤ģ”¢ĖķĢŚ£³£·¤Ļµ°Ę»¾²£³£¹¾å¤ĖĄßĆÖ¤µ¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£µ£°”Ū掣¶¤Ļ„攼„ß„Ź„ė”¢µ°Ę»ĄŚ“¹ĮõĆÖ”¢¤½¤ĪĀ¾¤ĪĆĻ¾åĮõĆÖ¤Ī¾ÜŗŁ¹½Ą®„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
掣¶””„攼„ß„Ź„ėµ°Ę»ĄŚ“¹ĮõĆÖ”¢¤½¤ĪĀ¾¤ĪĆĻ¾åĮõĆÖ¤Ī¾ÜŗŁ¹½Ą®¤ņ¼Ø¤¹„Ö„ķ„Ć„ÆæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę³ĘĮõĆÖ£“£°¤Ļ”¢æŽ£µ¤Ī¹ēĄ®²óĻ©£³£“¤«¤é½ŠĪĻ¤µ¤ģ¤ėæ®¹ę¤«¤éľĪ®Ą®Ź¬¤ņŹ¬Ī„¤¹¤ėľĪ®Ą®Ź¬Ź¬Ī„²óĻ©£“£±”¢Ä¾Ī®Ą®Ź¬Ź¬Ī„²óĻ©£“£±¤Ī½ŠĪĻ¤«¤é¹ā¼žĒČĄ®Ź¬¤ņŹ¬Ī„¤¹¤ė¹ā¼žĒČĄ®Ź¬Ź¬Ī„²óĻ©£“£²”¢¹ā¼žĒČĄ®Ź¬Ź¬Ī„²óĻ©£“£²¤Ī½ŠĪĻ¤Ė“š¤Å¤¤¤ĘĮ÷¤é¤ģ¤Ę¤¤æ殹ęĘā¤Ī£É£Ä¤¬¼«ĮõĆÖ¤Ī£É£Ä¤Č°ģĆפ¹¤ė¤«¤ņø”½Š¤¹¤ė£É£Ä°ģĆ×ø”½Š²óĻ©£“£³”¢°ģĆפ¬ø”½Š¤µ¤ģ¤æ¾ģ¹ē¤Ė¼«ĮõĆÖ¤ĖĀŠ¤¹¤ėĢæĪį¤ņ²ņĘɤ¹¤ėĢæĪį²ņĘɲóĻ©£“£“”¢ĢæĪį²ņĘÉ·ė²Ģ¤Ė½¾¤Ć¤ĘɬĶפŹĄ©øę¤ņ¼Ā¹Ō¤¹¤ė¼Ā¹Ō²óĻ©£“£µ”¢¼Ā¹Ō²óĻ©£“£µ¤Ī¼Ā¹Ō·ė²Ģ¤ĖĀŠ±ž¤·¤ĘɬĶפŹæ®¹ę¤ņĄ©øę¶É£±£µ¤ĖŹÖĮ÷¤¹¤ė¾ģ¹ē¤ĖĮ÷殤ņ¹Ō¤¦¤æ¤į¤ĪĮ÷殲óĻ©£“£¶”¢Į÷殲óĻ©£“£¶¤Ī½ŠĪĻ¤Ė“š¤Å¤¤¤Ę殹ęŹŃÄ“¤ņ¹Ō¤¦æ®¹ęŹŃÄ“²óĻ©£“£·¤«¤é¹½Ą®¤µ¤ģ¤Ę¤¤¤ė”£
””¤½¤·¤ĘľĪ®Ą®Ź¬Ź¬Ī„²óĻ©£“£±¤Ė¤č¤Ć¤ĘŹ¬Ī„¤µ¤ģ¤æľĪ®Ą®Ź¬¤Ė¤č¤Ć¤ĘĮõĆÖ£“£°¤ĖĀŠ¤¹¤ėÅÅĪĻ¶”µė¤¬Ą®¤µ¤ģ¤ė”£
”Ś£°£°£µ£±”Ū掣·¤ĻĀę¼Ö£±£ø¤Ī¹½Ą®„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
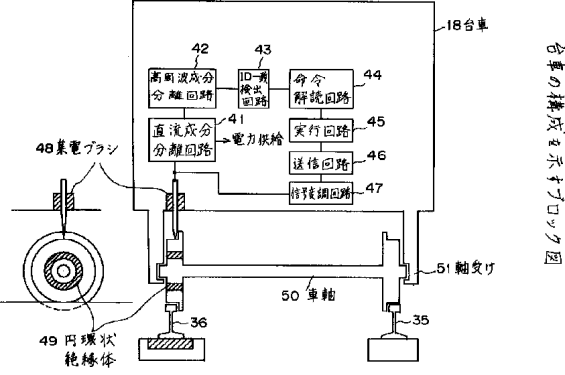
掣·””Āę¼Ö¤Ī¹½Ą®¤ņ¼Ø¤¹„Ö„ķ„Ć„ÆæŽ
””¤½¤ĪĘāÉō¹½Ą®¤Ļ掣¶¤Ī³ĘĮõĆÖ£“£°¤Ė¤Ŗ¤±¤ė¤ČʱĶĶ¤Ē¤¢¤ė¤¬”¢Ä¾Ī®Ą®Ź¬Ź¬Ī„²óĻ©£“£±¤Ų¤ĪĘžĪĻ¤Ŗ¤č¤Ó殹ęŹŃÄ“²óĻ©£“£·¤«¤é¤Ī½ŠĪĻ¤Ļ”¢½øÅÅ„Ö„é„·£“£ø¤ņ²š¤·¤ĘĘ³ÅÅĀ¦„ģ”¼„ė£³£¶¾å¤Ī¼ÖĪŲ¤ĖĄÜĀ³¤µ¤ģ¤ė”£
””¤³¤Ī¼ÖĪŲ¤Ļ”¢±ß“ľõĄä±ļĀĪ£“£¹¤Ė¤č¤Ć¤Ę”¢¼Ö¼“£µ£°”¢¤Ŗ¤č¤Ó¼“¼õ¤±£µ£±¤Ė¤č¤Ć¤ĘÅŵ¤ÅŖ¤ĖĄÜĀ³¤µ¤ģ¤ė„¢”¼„¹Ā¦„ģ”¼„ė£³£µ¤Č¤ĻĄä±ļ¤µ¤ģ¤ė”£
”Ś£°£°£µ£²”Ū掣ø¤Ļ掣µ¤Ė¤Ŗ¤¤¤ĘĘ³ÅÅĀ¦„ģ”¼„ė£³£¶¤ĖĶæ¤Ø¤é¤ģ¤ėÅÅ°µ¤Ī¹ēĄ®ŹżĖ”¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
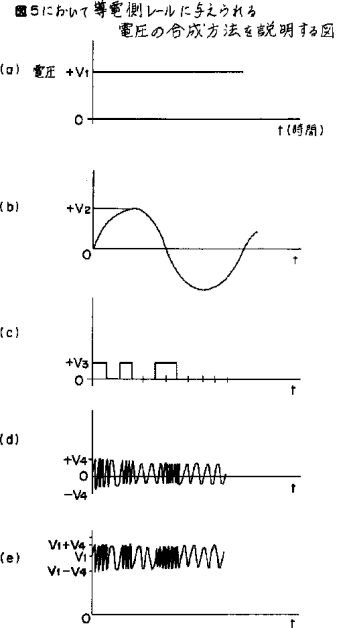
掣ø””掣µ¤Ė¤Ŗ¤¤¤ĘĘ³ÅÅĀ¦„ģ”¼„ė¤ĖĶæ¤Ø¤é¤ģ¤ėÅÅ°µ¤Ī¹ēĄ®ŹżĖ”¤ņĄāĢĄ¤¹¤ėæŽ
””ʱæŽ(a) ¤Ė¼Ø¤¹Ä¾Ī®ÅÅ°µ”¢¤Ž¤æ¤Ļ(b) ¤Ė¼Ø¤¹Äć¼žĒȤĪøņĪ®ÅÅ°µ¤¬æŽ£µ¤ĪÅÅø»²óĻ©£³£²¤«¤é½ŠĪĻ¤µ¤ģ¤ė”£
””°ģŹżĮ÷殤¹¤Ł¤æ®¹ęĄ®Ź¬(c) ¤ĖĀŠ¤·¤Ę殹ęŹŃÄ“²óĻ©£³£³¤Ė¤č¤Ć¤Ę¹ā¼žĒČŹŃÄ“¤¬¹Ō¤ļ¤ģ”¢(d) ¤Ė¼Ø¤¹æ®¹ę¤¬ĘĄ¤é¤ģ¤ė”£
””ÅÅø»²óĻ©£³£²¤Ŗ¤č¤Ó殹ęŹŃÄ“²óĻ©£³£³¤Ī½ŠĪĻ¤Ļ¹ēĄ®²óĻ©£³£“¤Ė¤č¤Ć¤Ę¹ēĄ®¤µ¤ģ”¢(e) ¤Ė¼Ø¤¹¤č¤¦¤ĖĪć¤Ø¤ŠÄ¾Ī®Ą®Ź¬¤Ė¹ā¼žĒČŹŃÄ“¤µ¤ģ¤ææ®¹ęĄ®Ź¬¤¬²Ć¤Ø¤é¤ģ¤Ę”¢Ę³ÅÅĀ¦„ģ”¼„ė£³£¶¤ĖĶæ¤Ø¤é¤ģ¤ė¤³¤Č¤Ė¤Ź¤ė”£
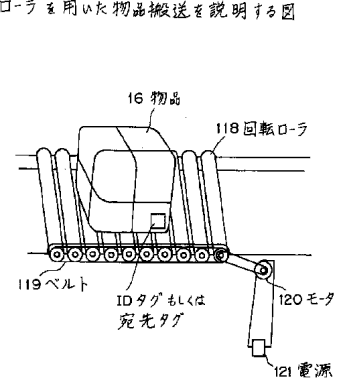
”Ś£°£°£µ£³”Ū掣¹¤ĻĀę¼Ö¤Ī±æžĄ©øę¤Ī¤æ¤į¤Ī²óĻ©¤Ī¾ÜŗŁ¹½Ą®„Ö„ķ„Ć„Æ掤Ē¤¢¤ė”£
掣¹””Āę¼Ö¤Ī±æžĄ©øę¤Ī¤æ¤į¤Ī²óĻ©¤Ī¾ÜŗŁ¹½Ą®¤ņ¼Ø¤¹„Ö„ķ„Ć„ÆæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę¼Ā¹Ō²óĻ©£“£µ¤Ī½ŠĪĻ¤Ļ²ĆĀ®ÅŁ»Ų¼Ø„ģ„ø„¹„棵£¶¤ĖĶæ¤Ø¤é¤ģ”¢²ĆĀ®ÅŁ»Ų¼Ø„ģ„ø„¹„棵£¶¤Ī½ŠĪĻ¤Ļ„ā”¼„æ¶īĘ°²óĻ©£µ£·”¢¤Ŗ¤č¤Ó„Ö„ģ”¼„¶īĘ°²óĻ©£µ£¹¤ĖĶæ¤Ø¤é¤ģ¤ė”£
”Ś£°£°£µ£“”Ū„ā”¼„æ¶īĘ°²óĻ©£µ£·¤Ī½ŠĪĻ¤Ė¤č¤Ć¤Ę„ā”¼„棵£ø¤¬¶īĘ°¤µ¤ģ”¢„ā”¼„æ¤Ī²óžæō”¢¤¹¤Ź¤ļ¤ĮĀ®ÅŁ¤Ļ¾®¤µ¤ŹČÆÅŵ””¢¤ā¤·¤Æ¤ĻĀ®ÅŁ·×Ā¬ĶѤĪ„Ń„ė„¹„«„¦„ó„æ¤Č¤·¤Ę¤ĪĀ®ÅŁ·×£¶£²¤Ė¤č¤Ć¤ĘĀ¬Äź¤µ¤ģ”¢¤½¤ĪĀ¬Äź·ė²Ģ¤ĻĀ®ÅŁ„ģ„ø„¹„棶£³¤Ė³ŹĒ¼¤µ¤ģ¤æø唢¼Ā¹Ō²óĻ©£“£µ¤ĖĶæ¤Ø¤é¤ģ¤ė”£
””¤Ž¤æ„Ö„ģ”¼„¶īĘ°²óĻ©£µ£¹¤Ī½ŠĪĻ¤Ė¤č¤Ć¤Ę„Ö„ģ”¼„¶īĘ°µ”¹½£¶£°¤¬Ę°ŗī¤·”¢„Ö„ģ”¼„£¶£±¤¬¶īĘ°¤µ¤ģ¤Ę”¢Īć¤Ø¤Š¼Ö¼“¤Ė°µĪĻ¤¬²Ć¤Ø¤é¤ģ¤ė”£
””¤Ž¤æ¼Ā¹Ō²óĻ©£“£µ¤Ė¤Ļ„Æ„ķ„Ć„Æ²óĻ©£¶£“¤¬ĄÜĀ³¤µ¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£µ£µ”Ū¼Ā¹Ō²óĻ©£“£µ¤ĪĄ©øę¤Ė¤č¤Ć¤Ę¼Ā¹Ō¤µ¤ģ¤ė¼Ā¹ŌĢæĪį¤Ī¼ļĪą¤Č¤·¤Ę¤Ļ”¢»ŲÄź¤µ¤ģ¤æ²ĆĀ®ÅŁ¤Ē¤Ī²ĆøŗĀ®”¢»ŲÄź¤µ¤ģ¤æĀ®ÅŁ¤Ē¤ĪĮö¹Ō”¢¤ā¤·¤Æ¤ĻÄä»ß”¢µŽÄä»ß”¢ĶĘ“ļ¤ĪĀę¼Ö¤Ų¤ĪÅėŗÜ”¢ĶĘ“ļ¤ĪĀę¼Ö¤«¤é¤Ī¼č¤ź³°¤·”¢ĶĘ“ļ¤ĪŹÄŗ攢ĶĘ“ļ¤Ī³«Č””¢¤Ŗ¤č¤Ó„Æ„ķ„Ć„Æ¤Ī„»„ƄȤŹ¤É¤¬¤¢¤ė”£
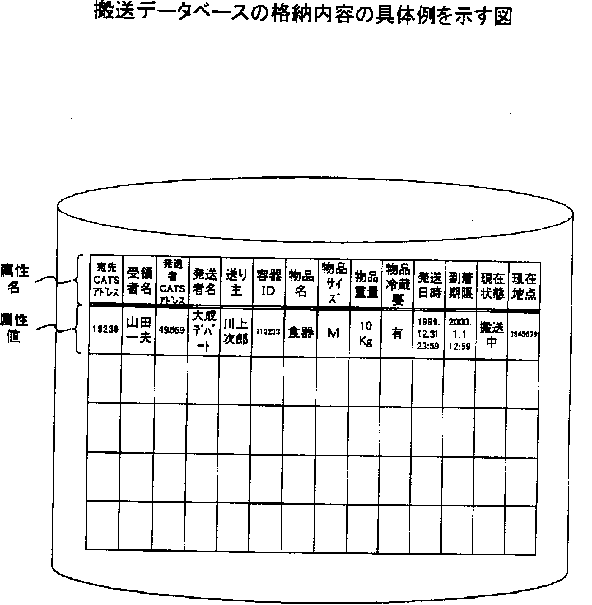
”Ś£°£°£µ£¶”Ū掣±£°¤ĻĄ©øę¶É¤ĪĘāÉō¤Īµ²±ĮõĆÖ£²£¹¤Ė³ŹĒ¼¤µ¤ģ¤ėČĀĮ÷„Ē”¼„æ„Ł”¼„¹£¶£¶¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣±£°””Ą©øę¶É¤ĪĘāÉō¤ĪČĀĮ÷„Ē”¼„æ„Ł”¼„¹¤ĪĄāĢĄæŽ
””ČĀĮ÷„Ē”¼„æ„Ł”¼„¹£¶£¶¤Ļ”¢Īć¤Ø¤Š¤½¤ģ¤¾¤ģ£±¤Ä¤ĪŹŖÉŹ¤ĪČĀĮ÷¤ĖĀŠ±ž¤¹¤ėČĀĮ÷„Č„é„󄶄Ƅ·„ē„ó¾šŹó¤«¤é¹½Ą®¤µ¤ģ”¢¤½¤ģ¤¾¤ģ¤ĪČĀĮ÷„Č„é„󄶄Ƅ·„ē„ó¾šŹó£¶£·¤Ļ°ģČĢ¤ĖŹ£æō¤ĪČĀĮ÷„Č„é„󄶄Ƅ·„ē„óĀ°Ą£¶£ø¤Ė¤č¤Ć¤Ę¹½Ą®¤µ¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£µ£·”Ū掣±£±¤Ļ¤³¤ĪČĀĮ÷„Ē”¼„æ„Ł”¼„¹£¶£¶¤Ī³ŹĒ¼ĘāĶʤĪ¶ńĀĪĪć¤Ē¤¢¤ė”£
掣±£±””ČĀĮ÷„Ē”¼„æ„Ł”¼„¹¤Ī³ŹĒ¼ĘāĶʤĪ¶ńĀĪĪć¤ņ¼Ø¤¹æŽ
””Ę±æŽ¤Ė¼Ø¤¹¤č¤¦¤Ė”¢ČĀĮ÷„Č„é„󄶄Ƅ·„ē„ó¾šŹó¤ĻŹŖÉŹĢ¾¤Ź¤É¤Ī”¢ŹŖÉŹ¤½¤Ī¤ā¤Ī¤ĖĀŠ±ž¤¹¤ėŹ£æō¤ĪĀ°Ą¤Č”¢ŹŖÉŹ¤Ī°øĄč„¢„É„ģ„¹¤äČÆĮ÷¼Ō„¢„É„ģ„¹¤Ź¤É¤Ī”¢ČĀĮ÷¤Ė“Ų¤¹¤ėŹ£æō¤ĪĀ°Ą¤Č¤«¤é¹½Ą®¤µ¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£µ£ø”Ūøå½Ņ¤¹¤ė¤č¤¦¤Ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą”Ź„³„ā„ó„Ŗ”¼„Č„Ž„Ę„£„Ć„Æ„Č„é„󄹄Ż”¼„Č„·„¹„Ę„ą”¢£Ć£Į£Ō£Ó”Ė¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢°øĄčĆĻÅĄ”¢ČÆĮ÷ĆĻÅĄ”¢Āę¼Ö¤Īø½ŗߤĪĮö¹ŌĆĻÅĄ¤Ź¤É¤¬”¢¤½¤ģ¤¾¤ģ¤ĪĆĻÅĄ¤ņ„ę„Ė”¼„ƤĖ¼±ŹĢ¤¹¤ė¤æ¤į¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ė¤č¤Ć¤Ę»ŲÄź¤µ¤ģ¤ė”£
”Ś£°£°£µ£¹”Ū¤³¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņĶѤ¤¤Ę¤ĪČĀĮ÷Ą©øę¤Ė¤Ä¤¤¤Ę¹¹¤ĖĄāĢĄ¤¹¤ė”£
””Į°½Ņ¤Ī¤č¤¦¤Ė”¢Āę¼Ö£±£ø¤äµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤ņĄ©øę¤¹¤ė¤æ¤į¤ĪČĀĮ÷Ą©øę殹ę¤Ļ”¢æŽ£µ¤Ī²óĻ©¤ņĶѤ¤¤ĘĀę¼Ö£±£ø¤äµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤ĖĶæ¤Ø¤é¤ģ”¢Āę¼Ö¤Ī²ĆĀ®ÅŁ¤äĀ®ÅŁ¤Ī»Ų¼Ø”¢¤¢¤ė¤¤¤ĻÄä»ß¤Ī»Ų¼Ø¤¬¹Ō¤ļ¤ģ¤ė”£
”Ś£°£°£¶£°”Ū¤³¤ĪČĀĮ÷Ą©øę殹ę¤Ė¤Ļ”¢æ®¹ę¤Ī°øĄč¤ĪĀę¼Ö£±£ø”¢¤Ž¤æ¤Ļµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹”¢¤¢¤ė¤¤¤Ļ„攼„ß„Ź„ė£±£³”¤£²£±¤Ī£É£Ä”¢¤Ž¤æ¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬“Ž¤Ž¤ģ¤Ę¤¤¤ė”£æŽ£¶”¤æŽ£·¤ĒĄāĢĄ¤·¤æ¤č¤¦¤Ė”¢³ĘĆĻ¾åĮõĆÖ¤Ž¤æ¤ĻĀę¼Ö¤ĻĘ³ÅÅĀ¦„ģ”¼„ė£³£¶¤ĖĪ®¤ģ¤ėæ®¹ę”¢¤¹¤Ź¤ļ¤Į„Ń„±„ƄȤņĮ“¤ĘĘɤó¤Ē²ņĘɤ·”¢¼«ĮõĆÖ¤ĖĀŠ±ž¤¹¤ė£É£Ä”¢¤ā¤·¤Æ¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬³ŹĒ¼¤µ¤ģ¤Ę¤¤¤ė„Ń„±„ƄȤņø”½Š¤¹¤ė¤Č”¢¤½¤Ī„Ń„±„ƄȤĪĘāĶʤ¬¼Ā¹Ō²óĻ©¤ĖĮ÷¤é¤ģ”¢É¬ĶפŹĄ©ø꤬¼Ā¹Ō¤µ¤ģ¤ė”£
””¤½¤Ī·ė²Ģ”¢Ą©øę¶ÉĀ¦¤Ē¤ĻĘ³ÅÅĀ¦„ģ”¼„ė£³£¶¤Ė¹ā¼žĒČ殹ę¤ņ¾č¤»¤ė¤Ą¤±¤Ē”¢¤½¤Ī殹ę¤ņ¼õ¤±¼č¤ė¤Ł¤ĮõĆÖ¤Ą¤±¤¬¤½¤Ī殹ę¤ĖĀŠ±ž¤¹¤ėĄ©øę¤ņ¼Ā¹Ō¤¹¤ė¤³¤Č¤Ė¤Ź¤ė”£
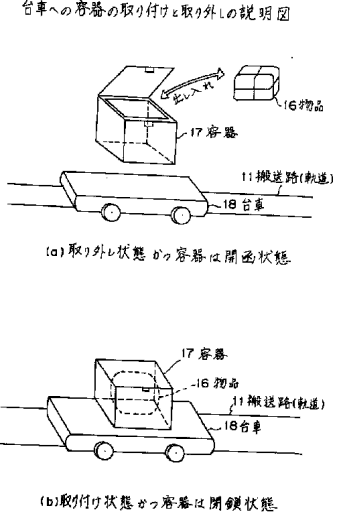
”Ś£°£°£¶£±”Ū掣±£²¤ĻĀę¼Ö¤Ų¤ĪŹŖÉŹ³ŹĒ¼ĶĘ“ļ¤Ī¼č¤źÉÕ¤±”¢¤Ŗ¤č¤Ó¼č¤ź³°¤·¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣±£²””Āę¼Ö¤Ų¤ĪĶĘ“ļ¤Ī¼č¤źÉÕ¤±¤Č¼č¤ź³°¤·¤ĪĄāĢĄæŽ
””ʱæŽ(a) ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢ĶĘ“ļ£±£·¤¬Āę¼Ö£±£ø¤«¤é¼č¤ź³°¤µ¤ģ”¢ĶĘ“ļ£±£·¤¬³«¤«¤ģ¤Ę”¢æĶ¤Ė¤č¤ėŹŖÉŹ£±£¶¤Ī½Š¤·Ęž¤ģ¤¬²ÄĒ½¤Č¤Ź¤Ć¤Ę¤¤¤ė”£
””(b) ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢ŹŖÉŹ£±£¶¤¬³ŹĒ¼¤µ¤ģ¤æĶĘ“ļ£±£·¤¬ŹÄŗ椵¤ģ”¢Āę¼Ö£±£ø¤Ė¼č¤źÉÕ¤±¤é¤ģ¤æ¾õĀÖ¤¬¼Ø¤µ¤ģ¤Ę¤¤¤ė”£
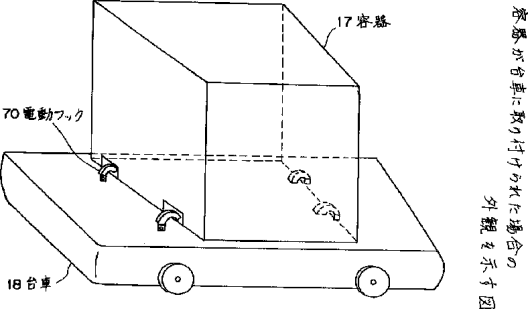
”Ś£°£°£¶£²”Ū掣±£³”¤æŽ£±£“¤Ļ”¢æŽ£±£²¤ĒĄāĢĄ¤·¤æ¤č¤¦¤ĖĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼č¤źÉÕ¤±”¢¼č¤ź³°¤·¤ņ²ÄĒ½¤Č¤¹¤ė”¢ÅÅĘ°„Õ„Ć„Æ¤Č¤½¤ĪĘ°ŗī¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣±£³””ĶĘ“ļ¤¬Āę¼Ö¤Ė¼č¤źÉÕ¤±¤é¤ģ¤æ¾ģ¹ē¤Ī³°“Ѥņ¼Ø¤¹æŽ
掣±£³¤ĻĶĘ“ļ£±£·¤¬Āę¼Ö£±£ø¤Ė¼č¤źÉÕ¤±¤é¤ģ¤æ¾ģ¹ē¤Ī³°“Ѥņ¼Ø¤·”¢ĶĘ“ļ£±£·¤ĻĀę¼Ö£±£ø¤Ė£“¤Ä¤ĪÅÅĘ°„Õ„Ć„Æ£·£°¤Ė¤č¤Ć¤ĘøĒÄź¤µ¤ģ¤Ę¤¤¤ė”£
”””Ś£°£°£¶£³”Ū掣±£“¤ĻÅÅĘ°„Õ„Ć„Æ¤Ė¤č¤ėĶĘ“ļ¤Ī³«Źü”¢¤Ŗ¤č¤ÓøĒğʰŗī¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣±£“””ÅÅĘ°„Õ„Ć„Æ¤Ė¤č¤ėĶĘ“ļ¤Ī³«Źü”¢¤Ŗ¤č¤ÓøĒğʰŗī¤ĪĄāĢĄæŽ
””ʱæŽ(a) ¤Ė¼Ø¤¹¤č¤¦¤ĖÅÅĘ°„Õ„Ć„Æ£·£°¤Ļ„ā”¼„棷£±”¢¤Ŗ¤č¤ÓĘ°ĪĻÅĮĆ£µ”¹½£·£²¤ĪĘ°ŗī¤Ė¤č¤Ć¤Ę¼“£·£³¤ņĆęæ“¤Č¤·¤Ę²óž¤·”¢ĶĘ“ļ£±£·¤ĻĀę¼Ö£±£ø¤«¤é²ņŹü¤µ¤ģ¤ė”£
””„ā”¼„棷£±¤Ī¶īĘ°ÅÅø»¤Č¤·¤Ę¤Ļ”¢Īć¤Ø¤ŠĮ°½Ņ¤ĪľĪ®Ą®Ź¬¤¬ĶѤ¤¤é¤ģ¤ė”£
””(b) ¤ĻÅÅĘ°„Õ„Ć„Æ£·£°¤Ė¤č¤ėĶĘ“ļ£±£·¤ĪøĒÄź¾õĀÖ¤ņ¼Ø¤·¤Ę¤Ŗ¤ź”¢ÅÅĘ°„Õ„Ć„Æ£·£°¤ĪĘ°ŗī¤Ļ„ā”¼„棷£±¤ČÅÅĪĻÅĮĆ£µ”¹½£·£²¤Ė¤č¤Ć¤Ę¹Ō¤ļ¤ģ¤ė”£
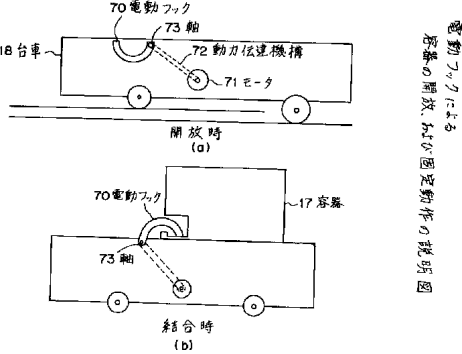
”Ś£°£°£¶£“”Ū掣±£µ”¤æŽ£±£¶¤Ļ”¢Īć¤Ø¤Š„攼„ß„Ź„ė¤Ė¤Ŗ¤¤¤ĘŹŖÉŹ¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ņĀę¼Ö¤Ė¼«Ę°ÅŖ¤ĖÅėŗܤ·¤æ¤ź”¢²·¤·¤æ¤ź¤¹¤ė¤æ¤į¤Ī¼«Ę°ĄŃ²·µ”¹½¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£æŽ£±£µ¤ĻĶĘ“ļ£±£·¤ĪĀę¼Ö£±£ø¤Ų¤Ī¼«Ę°ÅėŗÜŹżĖ”¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣±£µ””ĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼«Ę°ĄŃ²·¤·µ”¹½¤ĪĄāĢĄæŽ”Ź¤½¤Ī£±”Ė
””ʱæŽ(a) ¤Ė¼Ø¤¹¤č¤¦¤ĖĶĘ“ļ£±£·¤Ļ°ÜĘ°„¢”¼„ą£·£¶¤Ė²”¤µ¤ģ¤ĘĀę¼Ö£±£ø¤Ī¾å¤ĖÅėŗܤµ¤ģ¤ė”£
””(b) ¤Ė¼Ø¤¹¤č¤¦¤Ė”¢°ÜĘ°„¢”¼„ą£·£¶¤Ļ„Š”¼£·£µ¤Čæāľ¤ĖŹŻ¤æ¤ģ¤ė·Į¤ĒĶĘ“ļ£±£·¤ņ²”¤·¤Ź¤¬¤é°ÜĘ°¤·”¢¤½¤Ī·ė²ĢĀę£·£·¾å¤Ī„³„ķ£·£ø¤Ī¾å¤Ē”¢ĶĘ“ļ£±£·¤¬Āę¼Ö£±£ø¤ĪŹżøž¤Ė°ÜĘ°¤¹¤ė¤³¤Č¤Ė¤Ź¤ė”£
”Ś£°£°£¶£µ”Ū掣±£¶¤Ļ”¢æŽ£±£µ¤ČµÕ¤ĖĶĘ“ļ£±£·¤¬Āę¼Ö£±£ø¤ĖÅėŗܤµ¤ģ¤æ¾õĀÖ¤«¤é”¢°ÜĘ°„¢”¼„ą£·£¶¤Ė¤č¤Ć¤Ę²”¤µ¤ģ¤ĘĀę£·£·¤ĪŹżøž¤Ė°ÜĘ°¤¹¤ėĶĶ»Ņ¤ņ¼Ø¤·¤Ę¤¤¤ė”£
掣±£¶””ĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼«Ę°ĄŃ²·¤·µ”¹½¤ĪĄāĢĄæŽ”Ź¤½¤Ī£²”Ė
””掣±£·”¤æŽ£±£ø¤Ļ”¢æŽ£±£µ”¤æŽ£±£¶¤ČʱĶĶ¤ĖĀę¼Ö£±£ø¤Ų¤ĪĶĘ“ļ£±£·¤Ī¼«Ę°ĄŃ²·¤Ī¤æ¤į¤Īµ”¹½¤ĪĀ¾¤ĪĪć¤Ē¤¢¤ė”£
掣±£·””ĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼«Ę°ĄŃ²·¤·µ”¹½¤ĪĀ¾¤ĪĪć¤ņ¼Ø¤¹æŽ”Ź¤½¤Ī£±”Ė
””掣±£·¤Ė¤Ŗ¤¤¤ĘĀę¼Ö¤¬Āøŗߤ·¤Ę¤¤¤Ź¤¤¾õĀÖ¤ņ¼Ø¤·¤Ę¤Ŗ¤ź”¢ĶĘ“ļ£±£·¤ĻĶĘ“ļ»Ł»ż„ׄģ”¼„Č£ø£°¤Ī¾å¤Ė¾č¤»¤é¤ģ¤Ę¤¤¤ė”£
””ĶĘ“ļ»Ł»ż„ׄģ”¼„Č£ø£°¤Ļ»ŁĆģ£ø£±¤Ė¤č¤Ć¤Ę»Ł¤Ø¤é¤ģ”¢øå½Ņ¤¹¤ė¤č¤¦¤ĖÅÅĘ°µ”¹½£ø£²¤Ė¤č¤Ć¤Ę¤½¤ĪĘ°¤¤¬Ą©øꤵ¤ģ¤ė”£
”Ś£°£°£¶£¶”Ū掣±£ø¤Ļ”¢Āę¼Ö£±£ø¤Ī¾å¤ĖĶĘ“ļ£±£·¤¬Åėŗܤµ¤ģ¤æ¾õĀÖ¤ņ¼Ø¤¹”£
掣±£ø””ĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼«Ę°ĄŃ²·¤·µ”¹½¤ĪĀ¾¤ĪĪć¤ņ¼Ø¤¹æŽ”Ź¤½¤Ī£²”Ė
””Ę±æŽ¤Ė¼Ø¤¹¤č¤¦¤Ė”¢ĶĘ“ļ»Ł»ż„ׄģ”¼„Č£ø£°¤ĻÅÅĘ°µ”¹½£ø£²¤Ė¤č¤Ć¤ĘæåŹæŹżøž¤ĖĘ°¤«¤µ¤ģ”¢ĶĘ“ļ£±£·¤ĻĀę¼Ö£±£ø¤ĖÅėŗܤµ¤ģ¤ė¤³¤Č¤Ė¤Ź¤ė”£
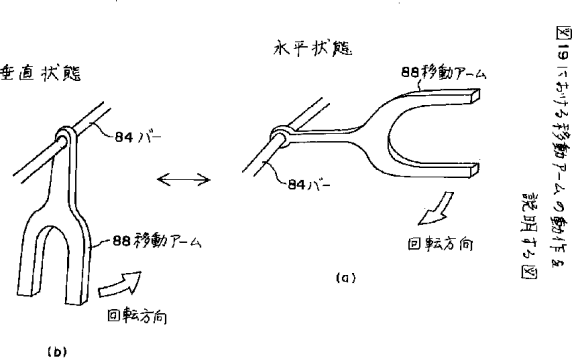
”Ś£°£°£¶£·”Ū掣±£¹¤ĻĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼«Ę°ÅėŗÜĮõĆÖ¤ĪĀč£³¤Ī¶ńĀĪĪć¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣±£¹””ĶĘ“ļ¤ĪĀę¼Ö¤Ų¤Ī¼«Ę°ĄŃ²·¤·µ”¹½¤ĪĀč£³¤ĪĪć¤ĪĄāĢĄæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢Āę¼Ö£±£ø¤Ē¤Ļ”¢¤½¤ĪĪ¾Ć¼¤¬¼«Ķ³¤Ź²óž¼“¤Č¤Ź¤Ć¤Ę¤¤¤ė·üæā„¢”¼„ą£ø£µ¤Ė¤č¤Ć¤Ę”¢·üæāĀę£ø£¶¤ĪæåŹæ¾õĀÖ¤¬ŹŻ¤æ¤ģ¤Ę¤¤¤ė”£
””„Š”¼£ø£“¤Ė±č¤Ć¤Ę°ÜĘ°²ÄĒ½¤ŹÅÅĘ°¤Ī°ÜĘ°„¢”¼„ą£ø£ø¤Ė¤č¤Ć¤ĘĶĘ“ļ£±£·¤¬°ÜĘ°¤µ¤»¤é¤ģ¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢Īć¤Ø¤ŠĀę£ø£·¤Ė¾č¤»¤é¤ģ¤Ę¤¤¤ėĶĘ“ļ£±£·¤Ļ·üæāĀę£ø£¶¤Ī¾å¤ĖÅėŗܤµ¤ģ”¢¤Ž¤æ¤ĻµÕ¤ĖĶĘ“ļ£±£·¤Ļ·üæāĀę£ø£¶¤«¤éĀę£ø£·¾å¤Ė°ÜĘ°¤µ¤ģ¤ė”£
””·üæāĀę£ø£¶¤ĖÅėŗܤµ¤ģ¤æĶĘ“ļ£±£·¤Ļ”¢Āę¼Ö£±£ø¤¬ČĀĮ÷Ļ©£±£±¤Ė±č¤Ć¤ĘŹÉ£ø£¹¤Ė³«¤±¤é¤ģ¤æÄĢ²į¹¦£¹£°¤ņÄĢ¤·¤Ę°ÜĘ°¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢°øĄč„攼„ß„Ź„ėĀ¦¤ĖČĀĮ÷¤µ¤ģ¤ė”£
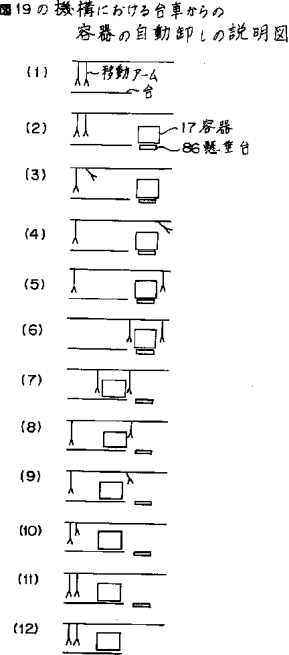
”Ś£°£°£¶£ø”Ū掣²£°¤Ļ掣±£¹¤Ė¤Ŗ¤±¤ė°ÜĘ°„¢”¼„ą¤ĪĘ°ŗī¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£°””掣±£¹¤Ė¤Ŗ¤±¤ė°ÜĘ°„¢”¼„ą¤ĪĘ°ŗī¤ņĄāĢĄ¤¹¤ėæŽ
””°ÜĘ°„¢”¼„ą£ø£ø¤Ļ”¢ĶĘ“ļ£±£·¤ņ±Ū¤Ø¤Ę°ÜĘ°¤Ē¤¤ė¤č¤¦¤Ė”¢„Š”¼£ø£“¤ņĆę擼“¤Č¤·¤Ę(a) ¤Ė¼Ø¤¹¤č¤¦¤Ėŗø”¢¤Ž¤æ¤Ļ±¦Źżøž¤ĖÅÅĘ°¤Ē£¹£°ÅŁ²óž²ÄĒ½¤Ź¤č¤¦¤Ė¤Ź¤Ć¤Ę¤¤¤ė”£
””¤Ž¤æ¤Ļ(b) ¤Ė¼Ø¤¹¤č¤¦¤Ė”¢„Š”¼£ø£“¤Ėøž¤«¤Ć¤Ę°ÜĘ°„¢”¼„ą£ø£ø¤¬æāľ¤Ė»ż¤Į¾å¤²¤é¤ģ¤ė¹½Ā¤¤Č¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
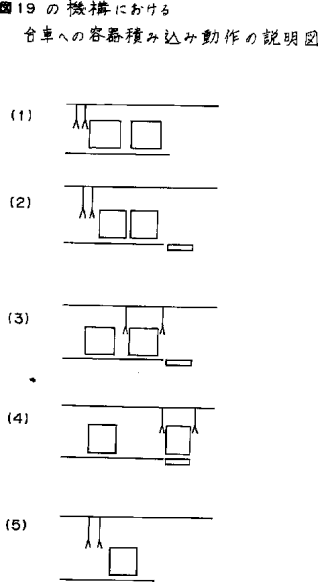
”Ś£°£°£¶£¹”Ū掣²£±¤Ļ掣±£¹¤ĪĮõĆÖ¤ņ»ČĶѤ·¤æ¾ģ¹ē¤ĪĀę¼Ö£±£ø¤«¤é¤ĪĶĘ“ļ£±£·¤Ī¼«Ę°²·¤·¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£±””掣±£¹¤Īµ”¹½¤Ė¤Ŗ¤±¤ėĀę¼Ö¤«¤é¤ĪĶĘ“ļ¤Ī¼«Ę°²·¤·¤ĪĄāĢĄæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢”Ź£²”Ė¤Ē·üæāĀę£ø£¶¤Ī¾å¤ĖĶĘ“ļ£±£·¤¬Åėŗܤµ¤ģ¤æĀę¼Ö¤¬ÅžĆ夷”¢”Ź£“”Ė¤ĒŹŅŹż¤Ī°ÜĘ°„¢”¼„ą¤¬ĶĘ“ļ£±£·¤Ī±¦Ā¦¤Ž¤Ē°ÜĘ°¤·”¢”Ź£¶”Ė¤ĒĪ¾Ā¦¤Ī°ÜĘ°„¢”¼„ą£ø£ø¤¬ĶĘ“ļ£±£·¤ņ¶“¤ó¤Ē”¢”Ź£·”Ė¤ĒĀę£ø£·¤Ī¾å¤Ė°ÜĘ°¤µ¤»¤ė”£
””¤½¤Īøå”Ź£ø”Ė”Į”Ź£±£°”Ė¤Ē°ÜĘ°„¢”¼„ą£ø£ø¤¬ĶĘ“ļ¤ĪŗøĀ¦¤Ė°ÜĘ°¤·”¢”Ź£±£²”Ė¤ĒĀę¼Ö¤¬µ¢“Ō¤·¤Ę”¢Ę°ŗī¤ņ½ŖĪ»¤¹¤ė”£
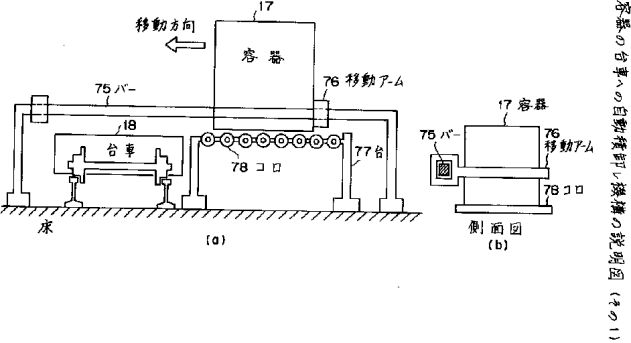
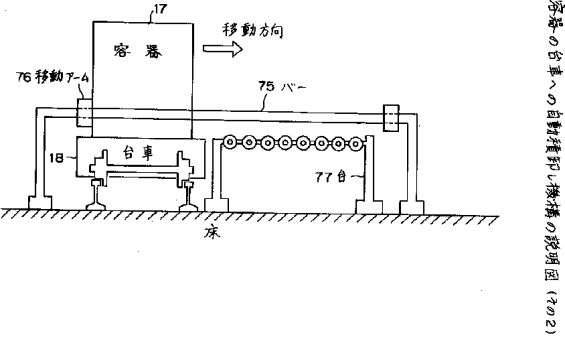
”Ś£°£°£·£°”Ū掣²£²¤Ļ”¢æŽ£²£±¤ČµÕ¤Ė”¢ĶĘ“ļ¤ņÅėŗܤ»¤ŗ¤Ė„攼„ß„Ź„ė¤ĖÅžĆ夷¤æĀę¼Ö¤Ų¤ĪĶĘ“ļĄŃ¹ž¤ßĘ°ŗī¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£²””掣±£¹¤Īµ”¹½¤Ė¤Ŗ¤±¤ėĀę¼Ö¤Ų¤ĪĶĘ“ļĄŃ¹ž¤ßĘ°ŗī¤ĪĄāĢĄæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢Īć¤Ø¤Š„攼„ß„Ź„ėĀ¦¤ĪĀę£ø£·¤Ī¾å¤Ė¤Ļ£²¤Ä¤ĪĶĘ“ļ¤¬¾č¤»¤é¤ģ¤Ę¤¤¤ė¤¬”¢ŗĒ¤āĀę¼Ö¤Ė¶į¤¤±¦Ā¦¤ĪĶĘ“ļ¤ņĀę¼Ö¤ĖÅėŗܤ¹¤ė¤ā¤Ī¤Č¤¹¤ė”£
”””Ź£²”Ė¤ĒĀę¼Ö¤¬ÅžĆ夹¤ė¤Č”¢”Ź£³”Ė¤Ē°ÜĘ°„¢”¼„ą£ø£ø¤¬²óž¤·¤Ź¤¬¤éŗøĀ¦¤ĪĶĘ“ļ¤ņ±Ū¤Ø”¢±¦Ā¦¤ĪĶĘ“ļ£±£·¤ņ¶“¤ß”¢”Ź£“”Ė¤ĒĶĘ“ļ¤ņ·üæāĀę£ø£¶¤Ī¾å¤Ė°ÜĘ°¤µ¤»”¢”Ź£µ”Ė¤ĒĀę¼Ö¤¬½ŠČƤ·¤æøå¤Ė°ÜĘ°„¢”¼„ą£ø£ø¤¬ŗøĀ¦¤Ė°ÜĘ°¤·¤æ¾õĀÖ¤¬¼Ø¤µ¤ģ¤Ę¤¤¤ė”£
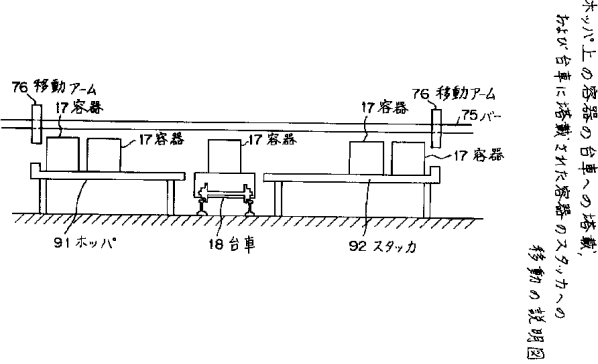
”Ś£°£°£·£±”Ū掣²£³¤Ļ„Ū„Ć„Ń¾å¤ĪĶĘ“ļ¤ĪĀę¼Ö¤Ų¤ĪÅėŗÜ”¢¤Ŗ¤č¤ÓĀę¼Ö¤ĖÅėŗܤµ¤ģ¤æĶĘ“ļ¤Ī„¹„æ„Ć„«¤Ų¤Ī°ÜĘ°¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£³””„Ū„Ć„Ń¾å¤ĪĶĘ“ļ¤ĪĀę¼Ö¤Ų¤ĪÅėŗÜ”¢¤Ŗ¤č¤ÓĀę¼Ö¤ĖÅėŗܤµ¤ģ¤æĶĘ“ļ¤Ī„¹„æ„Ć„«¤Ų¤Ī°ÜĘ°¤ĪĄāĢĄæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘĶĘ“ļ¤Ī°ÜĘ°¤Ļ”¢Īć¤Ø¤ŠæŽ£±£µ”¤æŽ£±£¶¤ĒĄāĢĄ¤·¤æµ”¹½¤Ė¤č¤Ć¤Ę¹Ō¤ļ¤ģ¤ė¤ā¤Ī¤Č¤¹¤ė”£
””Āę¼Ö¤ĖĄŃ¤ß¹ž¤ą¤Ł¤ĶĘ“ļ¤¬ĶųĶŃ¼Ō¤Ė¤č¤Ć¤Ę„Ū„Ć„Ń£¹£±¤Ī¾å¤ĖĆÖ¤«¤ģ¤ė¤Č”¢Āę¼Ö£±£ø¤Ė¶į¤¤Źż¤Ī¤ā¤Ī¤«¤é½ē¤Ė”¢°ÜĘ°„¢”¼„ą£·£¶¤Ė¤č¤Ć¤ĘĶĘ“ļ£±£·¤¬Āę¼Ö£±£ø¤ĖÅėŗܤµ¤ģ¤Ę”¢Āę¼Ö£±£ø¤¬½ŠČƤ¹¤ė”£
””°ģŹżĀę¼Ö£±£ø¤ĖÅėŗܤµ¤ģ¤ĘÅžĆ夷¤æĶĘ“ļ£±£·¤Ļ”¢°ÜĘ°„¢”¼„ą£·£¶¤Ė¤č¤Ć¤Ę¶“¤Ž¤ģ¤Ę„¹„æ„Ć„«£¹£²¤Ė²”¤·¹ž¤Ž¤ģ”¢„¹„Č„Ć„Æ¤µ¤ģ¤ė”£
””ĶųĶŃ¼Ō¤Ļ”¢„¹„æ„Ć„«£¹£²¤ĖÅžĆ夷¤æĶĘ“ļ£±£·¤ņĒ¤°Õ¤Ī½ē½ų¤Ē¼č¤ź½Š¤¹¤³¤Č¤¬¤Ē¤¤ė”£
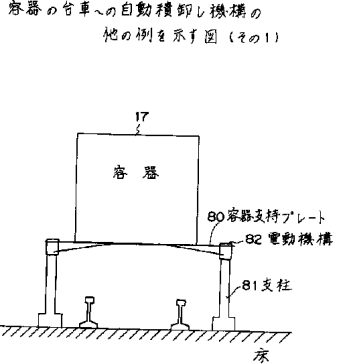
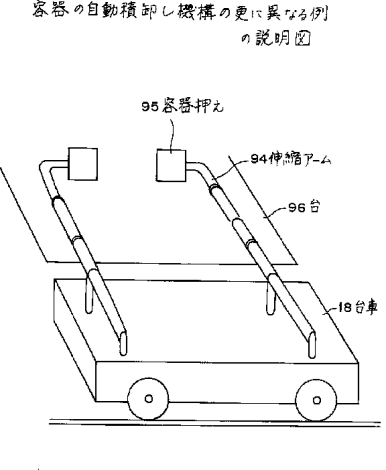
”Ś£°£°£·£²”Ū掣²£“¤ĻĶĘ“ļ¤Ī¼«Ę°ĄŃ²·µ”¹½¤Ī¹¹¤Ė°Ū¤Ź¤ė¶ńĀĪĪć¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£“””ĶĘ“ļ¤Ī¼«Ę°ĄŃ²·¤·µ”¹½¤Ī¹¹¤Ė°Ū¤Ź¤ėĪć¤ĪĄāĢĄæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘĀę¼Ö£±£ø¤«¤éæ½Ģ„¢”¼„ą£¹£“¤¬æ¤Š¤µ¤ģ”¢¤½¤ĪĄčĆ¼¤ĪĶĘ“ļ²”¤Ø£¹£µ¤ņĶѤ¤¤Ę”¢ĶĘ“ļ¤¬Āę£¹£¶¤«¤éĀę¼Ö£±£ø¤ĖÅėŗܤµ¤ģ¤ė”£
””¤³¤ĪŹż¼°¤ņĶѤ¤¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢ČĀĮ÷Ļ©Ā¦¤Ė¤ĻĶĘ“ļÅėŗܤĪ¤æ¤į¤Ī¼«Ę°µ”¹½¤¬ÉŌɬĶפȤŹ¤ė”£
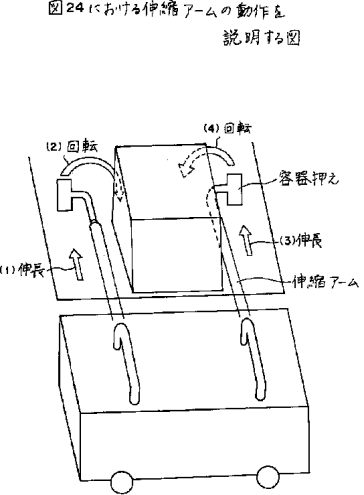
”Ś£°£°£·£³”Ū掣²£µ¤Ļ掣²£“¤Ė¤Ŗ¤±¤ėæ½Ģ„¢”¼„ą¤ĪĘ°ŗīĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£µ””掣²£“¤Ė¤Ŗ¤±¤ėæ½Ģ„¢”¼„ą¤ĪĘ°ŗī¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢Īć¤Ø¤Š¤Ž¤ŗŗøĀ¦¤Īæ½Ģ„¢”¼„ą£¹£“¤¬”Ź£±”Ė¤Ē椊¤µ¤ģ”¢”Ź£²”Ė¤Ē²óž¤µ¤»¤é¤ģ¤Ę”¢ĶĘ“ļ¤ņ²”¤·½Š¤¹¤³¤Č¤¬²ÄĒ½¤Č¤Ź¤ė”£
””¤½¤·¤Ę”Ź£³”Ė¤Ē±¦Ā¦¤Īæ½Ģ„¢”¼„ą£¹£“¤¬æ¤Š¤µ¤ģ”¢”Ź£“”Ė¤Ē²óž¤µ¤»¤é¤ģ¤Ę掣²£“¤Ė¼Ø¤¹¾õĀ֤ȤŹ¤ė”£
”Ś£°£°£·£“”Ū°Ź¾å”¢æŽ£±£µ”Į掣²£µ¤ĒĄāĢĄ¤·¤æ¤č¤¦¤Ė”¢ĖÜČÆĢĄ¤Īøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢¼č¤ź³°¤·²ÄĒ½¤ŹĶĘ“ļ¤ņĀę¼Ö¤Ė¼«Ę°ÅŖ¤Ė¼č¤źÉÕ¤±¤ėµ”¹½”¢¤ā¤·¤Æ¤ĻĀę¼Ö¤«¤éĶĘ“ļ¤ņ¼«Ę°ÅŖ¤Ė¼č¤ź³°¤¹µ”¹½¤¬Č÷¤Ø¤é¤ģ”¢ĶĘ“ļ¤ņÅėŗܤ»¤ŗ¤Ė„攼„ß„Ź„ė¤Ė¤ä¤Ć¤ĘĶč¤æĀę¼Ö¤Ė¼«Ę°ÅŖ¤ĖĶĘ“ļ¤¬Åėŗܤµ¤ģ¤ĘĀę¼Ö¤¬„攼„ß„Ź„ė¤«¤é°øĄč¤Ėøž¤±¤Ę½ŠČƤ¹¤ė¤³¤Č”¢¤Ŗ¤č¤ÓĶĘ“ļ¤ņÅėŗܤ·¤Ę„攼„ß„Ź„ė¤Ė¤ä¤Ć¤ĘĶč¤æĀę¼Ö¤«¤é¼«Ę°ÅŖ¤ĖĶĘ“ļ¤ņ²·¤·¤Ę”¢Āę¼Ö¤¬¤½¤Ī„攼„ß„Ź„ė¤«¤éČĀĮ÷Ļ©¤ĖĢį¤ė¤³¤Č¤¬²ÄĒ½¤Č¤Ź¤ė”£
”Ś£°£°£·£µ”Ū掣²£¶¤Ļ¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ĪČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¤Ų¤ĪČĀĮ÷¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£¶””¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ĪČÆĮ÷¼Ō„攼„ß„Ź„ė¤Ų¤ĪČĀĮ÷¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘĶĘ“ļ„×”¼„ė£¹£·¤Ė¤Ļ”¢¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ£¹£ø¤¬„×”¼„ė¤µ¤ģ¤Ę¤Ŗ¤ź”¢ĶųĶŃ¼Ō£±£°¤¬ČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¤«¤éĄ©øę¶É£±£µ¤ĖĀŠ¤·¤ĘĶĘ“ļĶ×µį¾šŹó¤ņĶæ¤Ø¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢Ą©øę¶É£±£µ¤ĻĶĘ“ļ„×”¼„ė£¹£·¤Ė¤¢¤ėĶĘ“ļ·²”¢¤Ž¤æ¤ĻĀę¼Ö¤ĖÅėŗܤµ¤ģ¤Ę¤¤¤ėĶųĶŃ²ÄĒ½¤ŹĶĘ“ļ·²¤«¤é”¢ĶųĶŃ¼Ō¤ĪĶ×µį¾ņ·ļ¤Ė¹ē¤¦¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņ¤ß¤Ä¤±¤Ę”¢¤½¤ĪĶĘ“ļ¤ņĀę¼Ö£±£ø¤ĖÅėŗܤ·¤ĘČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¤ĖČĀĮ÷¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢ĶųĶŃ¼Ō¤Ļ¼«¤é¤ĪĶ×µį¤Ė¹ē¤¦¼č¤ź³°¤·²ÄĒ½ĶĘ“ļ¤ņĶųĶѤ¹¤ė¤³¤Č¤¬²ÄĒ½¤Č¤Ź¤ė”£
”Ś£°£°£·£¶”ŪĖÜČÆĢĄ¤¬ĀŠ¾Ż¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ē¤Ļ”¢Į°½Ņ¤Ī¤č¤¦¤ĖĄ¤³¦Ćę¤Ī¤É¤ĪĆĻÅĄ¤Ē¤ā„ę„Ė”¼„ƤĖ¼±ŹĢ¤Ē¤¤ė¤č¤¦¤Ė”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬·č¤į¤é¤ģ¤ė”£
””Īć¤Ø¤Š”Č£¹”ɤņ¶čĄŚ¤źµ¹ę¤Č¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢ÅŌ»Ō¤Ź¤É¤ņɽ¤¹¤½¤ģ¤¾¤ģ¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪ·åæō¤Ļɬ¤ŗ¤·¤āøĒÄź¤Ē¤Ź¤Æ¤Č¤ā¤č¤Æ”¢Īć¤Ø¤Š¹ń£¹ ĀēĆĻ°č£¹ ¾®ĆĻ°č£¹ ÅŌ»Ō£¹ ¶č°č ČÖĆĻ£¹ Éō²°£¹£¹¤Ī¤č¤¦¤Ė„攼„ß„Ź„ė¤ĪĆÖ¤«¤ģ¤æÉō²°¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņ·č¤į¤ė¤³¤Č¤¬¤Ē¤¤ė”£
”Ś£°£°£·£·”Ū¶čĄŚ¤źµ¹ę¤Ė”¢Īć¤Ø¤Š”Č”„”É”¤”Č”æ”É”¤”Č”Ż”É”¤”Č ”ɤŹ¤É¤ņŗĪĶѤ·¤Ę¤ā¤č¤¤”£
””¶čĄŚ¤źµ¹ę¤Ė”Č£¹”ɤŹ¤É¤Īæō»ś¤ņŗĪĶѤ¹¤ė¤³¤Č¤ĪĶųÅĄ¤Ļ”¢ÅÅĻĆ„Ü„æ„ó¤ä„ź„ā„³„ó¤ä„Ę„ó„”¼¤Ź¤É¤Ē“Ź°×¤ĖĘžĪĻ¤Ē¤”¢¤½¤Īɽø½¤ņĖü¹ń¶¦ÄĢ¤ĪŹø»ś¤¹¤Ź¤ļ¤Įæō»ś¤Ė¤Ē¤¤ė¤Č¤³¤ķ¤Ė¤¢¤ė”£
”Ś£°£°£·£ø”Ū£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Īµ½ŅĪć¤Č¤·¤Ę¤Ļ”¢
”””¦ÅÅĻĆČÖ¹ę¤Ī¤č¤¦¤Ėæō»ś¤Ī¤ß¤Ī¤ā¤Ī”Ź£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹”Ė”¢
”””¦„¤„ó„攼„Ķ„ƄȤĪ£É£Š„¢„É„ģ„¹¤Ī¤č¤¦¤Ėæō»ś¤Č¾®æōÅĄ¤«¤é¤Ź¤ė¤ā¤Ī ”Ź10.83.140.170)”¢
”””¦„¤„ó„攼„Ķ„ƄȤĪ£Õ£Ņ£Ģ”ŹUniform Resource Locator”Ė¤Ī¤č¤¦¤Ė±Ńæō»ś¤Čµ¹ę¤«¤é¤Ź¤ė¤ā¤Ī”Źcats://cats.fujitsu.co.jp/headquarers/1F/room2/)”¢”Źcats://cats.fujitsu.co.jp/ headquarers/ personnel/ `jun yamamoto/)”¢”Źcats://catsjapan.co.jp/japan. 100. tokyo. chiyoda-ku. marunouchi. 6-1-1. A-building. 102. Kazuo-Yamada)
”””¦ĘāĄž¤Ī¤č¤¦¤Ė„µ„Ö„¢„É„ģ„¹¤ņ¤ā¤Į”¢ĘĆÄź¤Īµ¹ę¤Ē¶čĄŚ¤é¤ģ¤æ¤ā¤Ī”Źcats://cats.fujitsu.co.jp/headquarers+1234)
¤¬¤¢¤ė”£
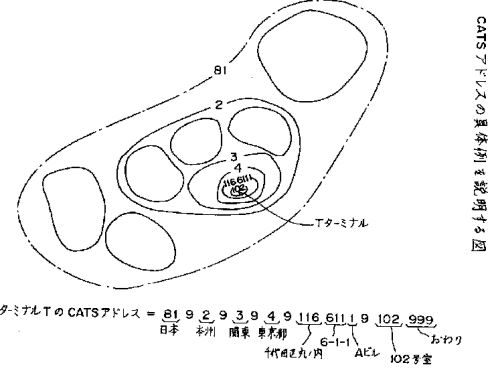
”Ś£°£°£·£¹”Ū掣²£·¤Ļ„攼„ß„Ź„ė£Ō¤Ī„¢„É„ģ„¹¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£·””£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ī¶ńĀĪĪć¤ņĄāĢĄ¤¹¤ėæŽ
””„攼„ß„Ź„ė£Ō¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ļ£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹¤Ē¤¢¤ė”£
””¤³¤Ī„¢„É„ģ„¹¤Ė¤Ŗ¤¤¤ĘŗĒ½é¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪ£ø£±¤ĻĘüĖܤņ”¢¶čĄŚ¤źµ¹ę¤Ē¤¢¤ė£¹¤Īøå¤Ī”¢¼”¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪ£²¤ĻĖܽ£¤ņ”¢¤½¤Ī¼”¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪ£³¤Ļ“ŲÅģ¤ņ”¢¼”¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪ£“¤ĻÅģµžÅŌ¤ņ”¢¼”¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪ£±£±£¶ £¶£±£±£±¤ĻĄéĀåÅÄ“Ż¤ĪĘā £¶”Ż£±”Ż£± £Į„Ó„ė¤ņ”¢¤½¤Ī¼”¤Ī„µ„Ö„Õ„£”¼„ė„ɤĻ£±£°£²¹ę¼¼¤ņɽ¤·”¢ŗĒøå¤Ī£¹£¹£¹¤Ļ„¢„É„ģ„¹¤Ī½Ŗ¤ļ¤ź¤ņ°ÕĢ£¤¹¤ė”£
””„ę”¼„¶„¤„ó„æ„Õ„§”¼„¹¤Ė¤č¤Ć¤Ę¤Ļ”¢ŗĒøå¤Ī£¹£¹£¹¤ņ¾ŹĪ¬²ÄĒ½¤Ē¤¢¤ė”£
””¤Ž¤æ”¢„Ē”¼„æ„Ł”¼„¹¤Č„į„Ć„»”¼„ø¤ĪĆę¤Ė¤Ŗ¤¤¤Ę¤ā”¢ŗĒøå¤Ī£¹£¹£¹¤ņ¾ŹĪ¬²ÄĒ½¤Ē¤¢¤ė”£
””¤³¤Ī„¢„É„ģ„¹¤ņĶѤ¤¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢Ą¤³¦Ćę¤Ī¤É¤ĪĆĻÅĄ¤«¤é¤Ē¤āĘüĖܤĪÅģµžÅŌĄéĀåÅĶ蓯¤ĪĘā£¶”Ż£±”Ż£±¤Ī£Į„Ó„ė£±£°£²¹ę¼¼¤ĖŹŖÉŹ¤¬ĘĻ¤Æ¤³¤Č¤Ė¤Ź¤ė”£
”Ś£°£°£ø£°”ŪĪć¤Ø¤ŠÅģµžÅŌĘā¤«¤é¤³¤Ī£±£°£²¹ę¼¼¤ĖŹŖÉŹ¤ņČÆĮ÷¤¹¤ė»ž¤Ī°øĄč¤Č¤·¤Ę¤Ļ”¢¶¦ÄĢ¤ĪĄčʬÉōŹ¬¤ņ¾ŹĪ¬¤¹¤ė¤³¤Č¤¬¤Ē¤£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹¤ņ„¢„É„ģ„¹¤Č¤·¤ĘĶѤ¤¤ė¤³¤Č¤¬¤Ē¤¤ė”£
””Ą©øę¶É£±£µ¤Ļ¤½¤ģ¤¾¤ģ¤Ī„攼„ß„Ź„ė¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņ„Ē”¼„æ„Ł”¼„¹¤Ėµ²±¤·¤Ę¤¢¤ź”¢¤½¤ģ¤ņ»²¾Č¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢Īć¤Ø¤Šµ°Ę»ĄŚ“¹ĮõĆÖ£±£¹¤ĪĄ©øę¤ņ¹Ō¤¦”£
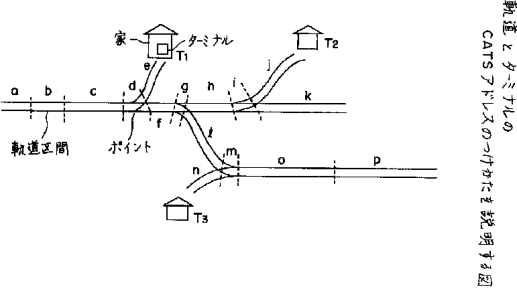
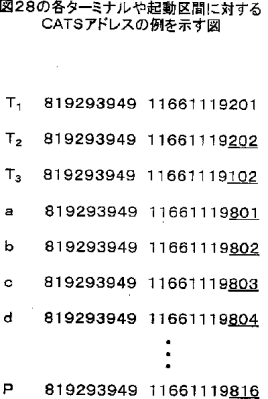
”Ś£°£°£ø£±”Ū掣²£ø”¤æŽ£²£¹¤Ļµ°Ę»¤Č„攼„ß„Ź„ė¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ī¶ńĀĪĪć¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣²£ø””µ°Ę»¤Č„攼„ß„Ź„ė¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ī¤Ä¤±¤«¤æ¤ņĄāĢĄ¤¹¤ėæŽ
””掣²£ø¤Ė¤Ŗ¤¤¤Ę”¢µ°Ę»¤ĻŬÅö¤Źµ°Ę»¶č“Ö¤Ė¶čĄŚ¤é¤ģ¤Ę„¢„É„ģ„¹¤¬¤Ä¤±¤é¤ģ¤ė¤Č¶¦¤Ė”¢„Ż„¤„ó„ȤĖ¤ā„¢„É„ģ„¹¤¬¤Ä¤±¤é¤ģ¤ė”£
””¤³¤ģ¤é¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĻĮ“¤Ę„ę„Ė”¼„ƤĖ¤Ä¤±¤é¤ģ¤ė”£
”Ś£°£°£ø£²”Ū掣²£¹¤Ļ掣²£ø¤Ī³Ę„攼„ß„Ź„ė¤äµ°Ę»¶č“Ö¤ĖĀŠ±ž¤¹£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĪć¤Ē¤¢¤ė”£
掣²£¹””掣²£ø¤Ī³Ę„攼„ß„Ź„ė¤äµ°Ę»¶č“Ö¤ĖĀŠ¤¹¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĪć¤ņ¼Ø¤¹æŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢„¢„ó„Ą”¼„鄤„ó¤Ļ¤½¤ĪĮ°¤Ī¹Ō¤Č„µ„Ö„Õ„£”¼„ė„ɤĪĆĶ¤¬°Ū¤Ź¤ė¤³¤Č¤ņ¼Ø¤·¤Ę¤¤¤ė”£
””¤Ź¤Ŗµ°Ę»¶č“Ö¤Ī¶čĄŚ¤ź¤Ļ„Ż„¤„ó„ȤĖ¤č¤Ć¤ĘŹ¬³ä¤µ¤ģ¤ė¤«”¢¤¢¤ė¤¤¤Ļ±æž¤äŹŻ¼é¤ĪÅŌ¹ē¾åŹ¬³ä¤·¤æ¤¤¶č“Ö¤ņ¼Ø¤¹”£
”Ś£°£°£ø£³”Ū掣³£°”¤æŽ£³£±¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņĶѤ¤¤æµ°Ę»ĄŚ“¹Ą©øę¤Ī¶ńĀĪĪć¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣³£°””£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņĶѤ¤¤æµ°Ę»ĄŚ“¹Ą©øę¤Ī¶ńĀĪĪć¤ņĄāĢĄ¤¹¤ėæŽ
””掣³£°¤Ė¤Ŗ¤¤¤ĘĄ©øę¶É£±£µ¤«¤é¤Īµ°Ę»ĄŚ“¹æ®¹ę”¢¤¹¤Ź¤ļ¤ĮČĀĮ÷Ą©øę殹ę¤Ļ”¢æŽ£µ¤Ź¤É¤Č¤Ļ°Ū¤Ź¤Ć¤ĘĘČĪ©¤ĪÅĮĮ÷Ąž£±£°£°¤ņ²š¤·¤Ę„Ē„³”¼„Ą£±£°£±¤ĖÅĮ¤Ø¤é¤ģ¤ė”£
””„Ē„³”¼„Ą£±£°£±¤ĻÅĮ¤Ø¤é¤ģ¤æĢæĪį¤ņ¾ļ¤Ė²ņĘɤ·”¢ĀŠ±ž¤¹¤ė„Ż„¤„ó„ȤĪ„¢„É„ģ„¹¤¬³ŹĒ¼¤µ¤ģ¤æĢæĪį¤¬ÅžĆ夹¤ė¤Č”¢¤½¤ĪĢæĪį¤ņ¼Ā¹Ō¤¹¤ė”£
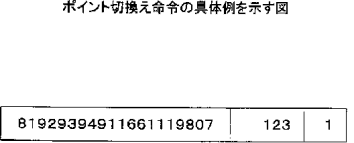
”Ś£°£°£ø£“”Ū掣³£±¤Ļ„Ż„¤„ó„Č£ē¤ņ£ę”Ż£ē”Ż£č¤ČĻ¢·ė¤¹¤ė¤æ¤į¤Ī”¢„Ē„³”¼„Ą£±£°£±¤ĖĀŠ¤¹¤ėĄŚ“¹ĢæĪį¤Ī¶ńĀĪĪć¤ņ¼Ø¤¹”£
掣³£±””„Ż„¤„ó„ČĄŚ“¹¤ØĢæĪį¤Ī¶ńĀĪĪć¤ņ¼Ø¤¹æŽ
””¤³¤ĪĢæĪį¤ĪŗĒ½é¤Ė³ŹĒ¼¤µ¤ģ¤Ę¤¤¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ļ„Ż„¤„ó„Č£ē¤ĖĀŠ±ž¤¹¤ė„¢„É„ģ„¹¤Ē¤¢¤ź”¢¤½¤Ī¼”¤Ī£±£²£³¤Ļ„Ż„¤„ó„ČĄŚ“¹¤ņ¼Ø¤·”¢ŗĒøå¤Ī£±¤ĻŗøĄŽ¤ņ¼Ø¤¹”£
””„Ż„¤„ó„Ȥ¬£ę”Ż£ē”Ż£č¤ČĻ¢·ė¤µ¤ģ¤ė¾ģ¹ē¤Ė¤Ļ”¢Āę¼Ö¤Ļ£ę”Ż£ē”Ż£č¤Ī¤č¤¦¤ĖĘ°¤Æ¾ģ¹ē¤Č”¢£č”Ż£ē”Ż£ę¤Ī¤č¤¦¤ĖĘ°¤Æ¾ģ¹ē¤ĪĪ¾Źż¤¬¤¢¤ė¤¬”¢¤É¤Į¤é¤Ī¾ģ¹ē¤Ė¤ā掣³£±¤ĪŗøĄŽ¤ĪĢæĪį¤Ė¤č¤Ć¤Ę„Ż„¤„ó„ȤĪĻ¢·ė¤¬¹Ō¤ļ¤ģ¤ė”£
”Ś£°£°£ø£µ”ŪĄ©øę¶É¤¬æŽ£³£±¤ĪĢæĪį¤ņĮ÷¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢„Ē„³”¼„Ą£±£°£±¤Ė¤č¤Ć¤Ę„ź„ģ”¼£±£°£³¤¬Ą©øꤵ¤ģ”¢„Ż„¤„ó„ČĄŚ“¹¼§ĄŠ£±£°£“”Ź£Š1 ”Ė¤ĖÅÅĪ®¤¬Ī®¤µ¤ģ”¢µÕ¤ĖÅż§ĄŠ£±£°£µ”Ź£Š2 ”Ė¤ĪÅÅĪ®¤¬ĄŚĆĒ¤µ¤ģ¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢£ę”Ż£ē”Ż£č¤Ī„Ż„¤„ó„ČĻ¢·ė¤¬Ą®¤µ¤ģ”¢¤½¤ĪøåĄ©øę¶É£±£µ¤«¤éĀę¼Ö£±£ø¤ĖĀŠ¤¹¤ė²ĆĀ®ĢæĪį¤¬Į÷¤é¤ģ¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢Āę¼Ö¤¬„Ż„¤„ó„Č£ē¤ņÄĢ²į¤¹¤ė¤³¤Č¤Ė¤Ź¤ė”£
”Ś£°£°£ø£¶”ŪĖÜČÆĢĄ¤¬ĀŠ¾Ż¤Č¤¹¤ėøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Į°½Ņ¤Ī¤č¤¦¤Ė”¢Īć¤Ø¤ŠĮ“¤Ę¤Ī„攼„ß„Ź„ė¤äµ°Ę»¶č“Ö¤¬£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ė¤č¤Ć¤Ę„ę„Ė”¼„ƤĖ¼±ŹĢ¤µ¤ģ¤ė¤¬”¢Īć¤Ø¤ŠĶųĶŃ¼Ō¤Ļ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĀå¤ļ¤ź¤Ė°øĄč¤ĪÅÅĻĆČÖ¹ę¤Ź¤É¤Ī”¢¤½¤ĪĀ¾¤Ī¾šŹó¤ņĶѤ¤¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””¤³¤Ī¾ģ¹ē¤ĖĄ©øę¶É¤Ė¤Ŗ¤¤¤ĘÅÅĻĆČÖ¹ę¤«¤é£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ų¤ĪŹŃ“¹¤¬¹Ō¤ļ¤ģ¤ė”£ ””掣³£²¤Ļ¤³¤Ī„¢„É„ģ„¹ŹŃ“¹¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣³£²””ÅÅĻĆČÖ¹ę¤«¤é£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ų¤ĪŹŃ“¹ŹżĖ”¤ņĄāĢĄ¤¹¤ėæŽ
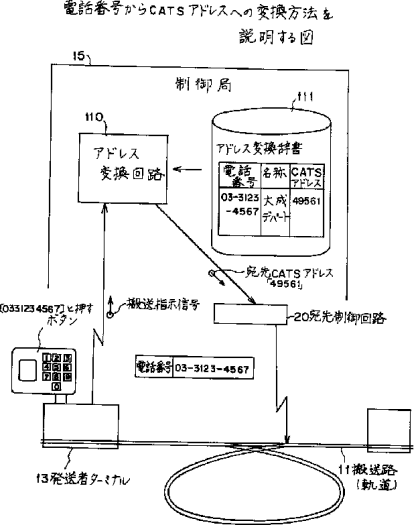
”Ś£°£°£ø£·”Ū掣³£²¤Ė¤Ŗ¤¤¤Ę”¢Ą©øę¶É£±£µ¤ĪĘāÉō¤Ė¤Ļ„¢„É„ģ„¹ŹŃ“¹²óĻ©£±£±£°¤Č”¢„¢„É„ģ„¹ŹŃ“¹¼½ń£±£±£±¤¬Č÷¤Ø¤é¤ģ¤ė”£
””¤½¤·¤ĘĪć¤Ø¤ŠĶųĶŃ¼Ō¤¬”¢ČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¤«¤éČĀĮ÷»Ų¼Ø¤Ī¤æ¤į¤Ī°øĄč¤Č¤·¤ĘÅÅĻĆČÖ¹ę£°£³”Ż£³£±£²£³”Ż£“£µ£¶£·¤ņĘžĪĻ¤¹¤ė¤Č”¢Ą©øę¶É£±£µ¤ĪĘāÉō¤Ī„¢„É„ģ„¹ŹŃ“¹²óĻ©£±£±£°¤Ė¤č¤Ć¤Ę„¢„É„ģ„¹ŹŃ“¹¼½ń£±£±£±¤ĪĘāĶʤ¬ø”ŗ÷¤µ¤ģ”¢¤½¤·¤Ę¤³¤ĪÅÅĻĆČÖ¹ę¤ĖĀŠ±ž¤¹¤ė°øĄč¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹£“£¹£µ£¶£±¤¬ĘĄ¤é¤ģ”¢¤³¤Ī°øĄč„¢„É„ģ„¹¤¬°øĄčĄ©øę²óĻ©£²£°¤ĖĶæ¤Ø¤é¤ģ”¢°øĄčĄ©øę²óĻ©£²£°¤Ė¤č¤Ć¤Ęµ°Ę»ĄŚ“¹¤ĪĄ©øꤏ¤É¤¬¹Ō¤ļ¤ģ”¢Āę¼Ö¤¬°øĄč£Ć£Į£Ō£Ó„¢„É„ģ„¹£“£¹£µ£¶£±¤Ė¤č¤Ć¤Ę¼Ø¤µ¤ģ¤ė”¢Īć¤Ø¤Š¼õĪĪ¼Ō„攼„ß„Ź„ė¤ĖÅžĆ夹¤ė¤č¤¦¤ŹĄ©ø꤬¹Ō¤ļ¤ģ¤ė”£
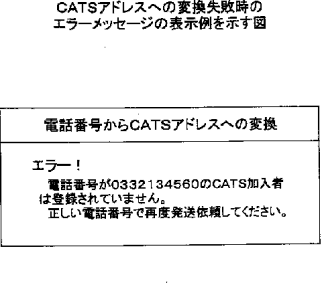
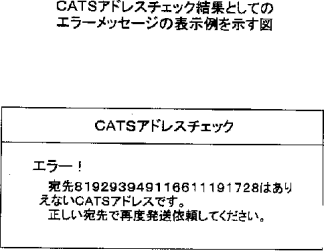
”Ś£°£°£ø£ø”Ū¤³¤Ī¤č¤¦¤ĖĄ©øę¶É¤ĪĘāÉō¤Ē”¢Īć¤Ø¤ŠÅÅĻĆČÖ¹ę¤«¤é£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ų¤ĪŹŃ“¹¤¬¹Ō¤ļ¤ģ¤ė¤¬”¢ŹŃ“¹¤¬¤Ē¤¤Ź¤¤¾ģ¹ē¤Ė¤ĻĶųĶŃ¼Ō¤ĖĀŠ¤·¤Ę„؄锼„į„Ć„»”¼„ø¤¬É½¼Ø¤µ¤ģ¤ė”£æŽ£³£³¤Ļ¤³¤Ī„؄锼„į„Ć„»”¼„øɽ¼ØĪć¤Ē¤¢¤ė”£
掣³£³””£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ų¤ĪŹŃ“¹¼ŗĒŌ»ž¤Ī„؄锼„į„Ć„»”¼„ø¤Īɽ¼ØĪć¤ņ¼Ø¤¹æŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢ÅÅĻĆČÖ¹ę£°£³”Ż£³£²£±£³”Ż£“£µ£¶£°¤ĖĀŠ±ž¤¹¤ė£Ć£Į£Ō£Ó²ĆĘž¼Ō¤¬ÅŠĻ椵¤ģ¤Ę¤¤¤Ź¤¤¤³¤Č¤¬”¢„؄锼„į„Ć„»”¼„ø¤Č¤·¤Ęɽ¼Ø¤µ¤ģ¤Ę¤¤¤ė”£
”Ś£°£°£ø£¹”Ū¤³¤Ī¤č¤¦¤ĖĄ©øę¶É¤Ļ”¢Īć¤Ø¤ŠÅÅĻĆČÖ¹ę¤«¤é£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ų¤ĪŹŃ“¹¤ņ¹Ō¤¦¤³¤Č¤¬¤Ē¤¤ė¤¬”¢µÕ¤Ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤«¤éÅÅĻĆČÖ¹ę¤Ų¤ĪŹŃ“¹¤ņ¹Ō¤¦¤³¤Č¤ā¤Ē¤¤ė”£æŽ£³£“¤Ļ¤³¤ĪŹŃ“¹¤Č”¢¤½¤ĪŹŃ“¹·ė²Ģ¤ĪČÆĮ÷¼Ō„攼„ß„Ź„ė¾å¤Ī„Ē„£„¹„ׄģ„¤¤Ų¤Īɽ¼Ø¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣³£“””£Ć£Į£Ō£Ó„¢„É„ģ„¹¤«¤éÅÅĻĆČÖ¹ę¤Ų¤ĪŹŃ“¹¤Č”¢ŹŃ“¹·ė²Ģ¤Īɽ¼ØĪć¤ĪĄāĢĄæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢Īć¤Ø¤ŠĶųĶŃ¼Ō¤¬ČĀĮ÷»Ų¼Ø殹ę¤ĪĘāÉō¤Ē°øĄč¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę£“£¹£µ£¶£±£¹£¹£¹¤ņĘžĪĻ¤¹¤ė¤Č”¢Ą©øę¶É£±£µ¤ĪĘāÉō¤Ī„¢„É„ģ„¹ŹŃ“¹²óĻ©£±£±£°¤Ļ„¢„É„ģ„¹ŹŃ“¹¼½ń£±£±£±¤ĪĘāĶʤņø”ŗ÷¤·¤Ę”¢¤½¤Ī„¢„É„ģ„¹¤ĖĀŠ±ž¤¹¤ėÅÅĻĆČÖ¹ę¤¬£°£³”Ż£³£±£²£³”Ż£“£µ£¶£·¤Ē¤¢¤ė¤³¤Č¤ņø”½Š¤·”¢Īć¤Ø¤Š¤³¤ĪÅÅĻĆČÖ¹ę¤Č°øĄč¤ĪĢ¾¾Ī¤Č¤ņ”¢ČÆĮ÷¼Ō„攼„ß„Ź„ė£±£³¾å¤Ī„Ē„£„¹„ׄģ„¤¤ĖĀŠ¤·¤Ęɽ¼Ø„Ē”¼„æ¤Č¤·¤ĘĶæ¤Ø¤ė¤Č¶¦¤Ė”¢°øĄčĄ©øę²óĻ©£²£°¤ĖĀŠ¤·¤Ę¤Ļ°øĄč£Ć£Į£Ō£Ó„¢„É„ģ„¹£“£¹£µ£¶£±¤ņĶæ¤Ø”¢æŽ£³£²¤Ė¤Ŗ¤±¤ė¤ČʱĶĶ¤Ėµ°Ę»¤ČĀę¼Ö¤ĪĄ©ø꤬¼Ā¹Ō¤µ¤ģ¤ė”£
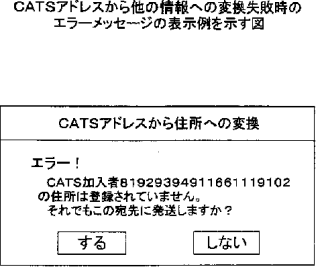
”Ś£°£°£¹£°”Ū掣³£µ¤Ļ¤³¤Ī¤č¤¦¤Ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤«¤éĀ¾¤Ī¾šŹó¤Ų¤ĪŹŃ“¹”¢Īć¤Ø¤Š½»½ź¤Ų¤ĪŹŃ“¹¤Ė¼ŗĒŌ¤·¤æ»ž¤Ėɽ¼Ø¤µ¤ģ¤ė„؄锼„į„Ć„»”¼„ø¤Ī¶ńĀĪĪć¤Ē¤¢¤ė”£
掣³£µ””£Ć£Į£Ō£Ó„¢„É„ģ„¹¤«¤éĀ¾¤Ī¾šŹó¤Ų¤ĪŹŃ“¹¼ŗĒŌ»ž¤Ī„؄锼„į„Ć„»”¼„ø¤Īɽ¼ØĪć¤ņ¼Ø¤¹æŽ
””Īć¤Ø¤Š£Ć£Į£Ō£Ó„¢„É„ģ„¹£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£±£¹£±£°£²¤ĖĀŠ¤¹¤ė½»½ź¤¬ÅŠĻ椵¤ģ¤Ę¤¤¤Ź¤¤¤³¤Č¤¬É½¼Ø¤µ¤ģ¤Ę¤¤¤ė”£
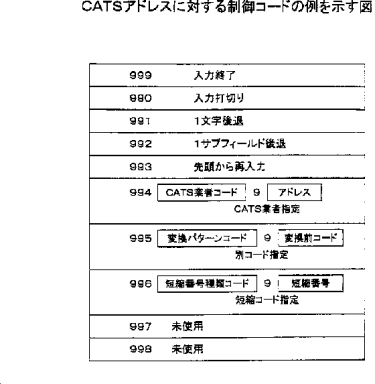
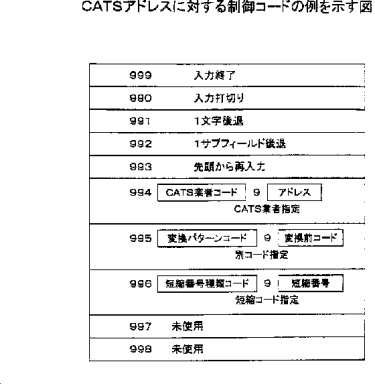
”Ś£°£°£¹£±”Ū°Ź¾åĄāĢĄ¤·¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹Ęā¤Ē”¢ĘĆÄź¤Īæō»ś”¢¤ā¤·¤Æ¤Ļµ¹ę¤Ė¶čĄŚ¤ź¤ä”¢ĘĆÄźĄ©øę¤Ī°ÕĢ£¤ņÄź¤į¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢¤½¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘžĪĻ¤Ė¤č¤Ć¤ĘĘžĪĻ“°Ī»”¢ĘžĪĻĀĒĄŚ¤ź”ŹĘžĪĻ¼č¾Ć¤·”Ė”¢ĘžĪĻÄūĄµ¤Ź¤É¤ĪĶĶ”¹¤Ź»Ų¼Ø¤ņĶæ¤Ø¤ė¤³¤Č¤¬²ÄĒ½¤Ė¤Ź¤ė”£
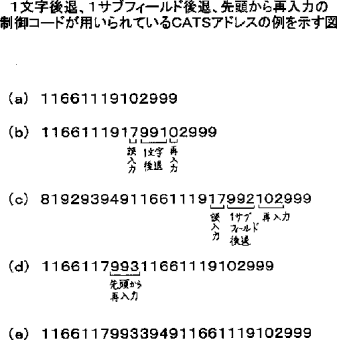
””Į°½Ņ¤Ī¤č¤¦¤Ė”¢£±øĤĪ£¹¤Ļ„µ„Ö„Õ„£”¼„ė„ɤĪ¶čĄŚ¤ź¤Ē¤¢¤ė¤¬”¢£²øĤĪ£¹¤Ļ¼”¤Ėµ”Ē½¼ļŹĢ¤¬Ā³¤ÆĄ©øę„³”¼„ɤņɽ¤¹¤ā¤Ī¤Č¤·”¢æŽ£³£¶¤Ī¤č¤¦¤Ź°ÕĢ£¤ņĶ¤¹¤ė¤ā¤Ī¤Č¤¹¤ė”£
掣³£¶””£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖĀŠ¤¹¤ėĄ©øę„³”¼„ɤĪĪć¤ņ¼Ø¤¹æŽ
”Ś£°£°£¹£²”Ū掣³£¶¤Ė¤Ŗ¤¤¤Ę”¢Īć¤Ø¤Š£¹£¹£¹¤ĻĘžĪĻ¤Ī½ŖĪ»¤ņ”¢£¹£¹£°¤ĻĘžĪĻĀĒĄŚ¤ź”Ź¼č¾Ć¤·”Ė¤ņ”¢£¹£¹£³¤ĻĄčʬ¤«¤éŗĘĘžĪĻ¤ņ¼Ø¤¹Ą©øę„³”¼„ɤĒ¤¢¤ź”¢£¹£¹£·¤Ŗ¤č¤Ó£¹£¹£ø¤ĻĢ¤»ČĶѤĒ¤¢¤ė”£
””¤½¤ĪĀ¾¤ĪĄ©øę„³”¼„ɤĖ¤Ä¤¤¤Ę¤Ļøå½Ņ¤¹¤ė”£
”Ś£°£°£¹£³”Ū掣³£·¤ĻĘžĪĻ½ŖĪ»¤ĪĄ©øę„³”¼„É£¹£¹£¹¤¬ŗĒøå¤Ė¤¢¤ź”¢Į“¤Ęʱ¤ø°ÕĢ£¤ņ»ż¤Ä£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĪć¤Ē¤¢¤ė”£
掣³£·””ʱ¤ø°ÕĢ£¤ņ»ż¤Ä£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĪć¤ņ¼Ø¤¹æŽ
””(a) ¤Ļ“°Į“¤Ź£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ē¤¢¤ź”¢£Į„Ó„ė£±£°£²¹ę¼¼”Ź»³ÅÄ°ģÉ×”Ė¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņ¼Ø¤¹”£
””(b) ¤ĻĘüĖܹńĘā¤Ė¤Ŗ¤¤¤ĘĘžĪĻ¤µ¤ģ¤ė„¢„É„ģ„¹¤ņ¼Ø¤·”¢¤³¤ĪĘžĪĻ¤Ė¤č¤Ć¤Ę¹ń¤ņɽ¤¹„³”¼„É£ø£±¤¬Źä¤ļ¤ģ¤Ę”¢“°Į“¤Ź£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤Ź¤ė”£
””(c) ”Į(f) ¤ĻÅģµžÅŌĘā¤Ė¤Ŗ¤¤¤ĘĘžĪĻ¤µ¤ģ¤æ¾ģ¹ē¤Ė”¢¤¤¤ŗ¤ģ¤ā£Į„Ó„ė£±£°£²¹ę¼¼¤ņ»Ų¤¹£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Čø«¤Ź¤µ¤ģ¤ė”£
”Ś£°£°£¹£“”ŪĪć¤Ø¤Š£Į„Ó„ė”Ź£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£±”Ė¤ĪĒ¤°Õ¤ĪÉō²°¤Ė¤Ŗ¤¤¤Ę”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę£“£“£“£¹£¹£¹¤¬ĘžĪĻ¤µ¤ģ¤æ¾ģ¹ē¤Ė¤Ļ£Į„Ó„ė¤Ī£“£“£“¹ę¼¼¤ņ¼Ø¤¹¤ā¤Ī¤Č²ņ¼į¤µ¤ģ¤ė”£
”Ś£°£°£¹£µ”Ū¼”¤ĖĘžĪĻĀĒĄŚ¤ź”Ź¼č¾Ć¤·”Ė¤ĪĄ©øę„³”¼„ɤņ“Ž¤ąĪć¤Č¤·¤Ę”¢„¢„É„ģ„¹£ø£±£¹£²£¹£³£¹£¹£°¤¬ĘžĪĻ¤µ¤ģ¤æ»ž¤Ė”¢ČÆĮ÷¼Ō„攼„ß„Ź„ė”¢¤Ž¤æ¤ĻĄ©øę¶É¤Ļ”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘžĪĻ¤ņĶųĶŃ¼Ō¤¬ĀĒ¤ĮĄŚ¤Ć¤æ”¢¤¹¤Ź¤ļ¤Į¼č¤ź¾Ć¤·¤æ¤ČČ½ĆĒ¤·”¢¤½¤ģ°Ź¾å¤ĪĘžĪĻ¤ņµį¤į¤ŗ”¢ČĀĮ÷°ĶĶź¤¬¹Ō¤ļ¤ģ¤Ź¤«¤Ć¤æ¤ā¤Ī¤Č²ņ¼į¤¹¤ė”£
”Ś£°£°£¹£¶”Ū¼”¤Ė£±Źø»śøåĀą”¢£±„µ„Ö„Õ„£”¼„ė„ÉøåĀą”¢Ąčʬ¤«¤éŗĘĘžĪĻ¤ĪĄ©øę„³”¼„ɤĪ°ÕĢ£¤Ė¤Ä¤¤¤Ę”¢æŽ£³£ø¤ņĶѤ¤¤ĘĄāĢĄ¤¹¤ė”£
掣³£ø””£±Źø»śøåĀą”¢£±„µ„Ö„Õ„£”¼„ė„ÉøåĀą”¢Ąčʬ¤«¤éŗĘĘžĪĻ¤ĪĄ©øę„³”¼„ɤ¬ĶѤ¤¤é¤ģ¤Ę¤¤¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĪć¤ņ¼Ø¤¹æŽ
””掣³£ø¤ĻÅģµžÅŌ”Ź£ø£±£¹£²£¹£³£¹£“”ĖĘā¤Ė¤Ŗ¤¤¤ĘĘžĪĻ¤µ¤ģ¤æ¾ģ¹ē¤Ė”¢¤¤¤ŗ¤ģ¤ā£Į„Ó„ė¤Ī£±£°£²¹ę¼¼”Ź»³ÅÄ°ģÉ×”Ė¤ņ»Ų¤¹£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č²ņ¼į¤µ¤ģ¤ė¤ā¤Ī¤Ē¤¢¤ė”£
””(a) ¤Ļ掣³£·(c) ¤Čʱ¤ø¤Ē¤¢¤ė”£
””(b) ¤Ļ£±Źø»śøåĀą¤ĪĄ©øę„³”¼„ɤ¬ĶѤ¤¤é¤ģ¤Ę¤¤¤ėĪć¤Ē¤¢¤ź”¢Ą©øę„³”¼„É£¹£¹£±¤ĪĮ°¤Ī£·¤ĻĘžĪĻ„ß„¹¤Ē¤¢¤ź”¢¤³¤ģ¤¬¼č¤ź¾Ć¤µ¤ģ¤Ę£°¤¬ŗĘĘžĪĻ¤µ¤ģ¤æ¤³¤Č¤ņ°ÕĢ£¤·¤Ę¤¤¤ė”£
”Ś£°£°£¹£·”Ū¤Ž¤æ(c) ¤Ļ£±„µ„Ö„Õ„£”¼„ė„ÉøåĀą¤ĪĄ©øę„³”¼„ɤ¬ĶѤ¤¤é¤ģ¤Ę¤¤¤ėĪć¤Ē¤¢¤ź”¢¤½¤ĪĄ©øę„³”¼„É£¹£¹£²¤ĪĮ°¤Ī„µ„Ö„Õ„£”¼„ė„É£±£·¤ĻĘžĪĻ„ß„¹¤Ē¤¢¤ź”¢¤³¤ģ¤¬¾Ć¤µ¤ģ¤Ę£±£°£²¤¬ŗĘĘžĪĻ¤µ¤ģ¤æ¤³¤Č¤¬¼Ø¤µ¤ģ¤Ę¤¤¤ė”£
””(d) ¤Ŗ¤č¤Ó(e) ¤ĻĄčʬ¤«¤é¤ĪŗĘĘžĪĻ¤ĪĄ©øę„³”¼„É£¹£¹£³¤¬ĶѤ¤¤é¤ģ¤Ę¤¤¤ėĪć¤Ē¤¢¤ė”£
””(e) ¤ĻŗĘĘžĪĻ¤ĪĄčʬ¤Ė¹¹¤Ė£³£¹£“£¹¤¬ÄÉ²Ć¤µ¤ģ¤Ę¤¤¤ėĪć¤Ē¤¢¤ė”£
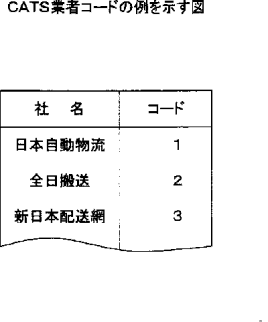
”Ś£°£°£¹£ø”Ū¼”¤Ė£Ć£Į£Ō£Ó¶Č¼Ō»ŲÄź¤ĪĄ©øę„³”¼„ɤĪ»ČĶŃĪć¤Ė¤Ä¤¤¤ĘĄāĢĄ¤¹¤ė”£æŽ£³£¹¤Ļ£³¤Ä¤Ī£Ć£Į£Ō£Ó¶Č¼Ō¤Ė¤½¤ģ¤¾¤ģ³ä¤źÉÕ¤±¤é¤ģ¤Ę¤¤¤ė£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ɤĪĪć¤Ē¤¢¤ė”£
掣³£¹””£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ɤĪĪć¤ņ¼Ø¤¹æŽ
””¤³¤³¤Ē£Ć£Į£Ō£Ó¶Č¼ŌĖč¤Ė½ÅŹ£¤·¤Ź¤¤£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņĶѤ¤¤ė¤ļ¤±¤Ē¤Ļ¤Ź¤Æ”¢¼Ā¼ĮÅŖ¤Ėʱ¤ø„¢„É„ģ„¹¤ņŹ£æō¤Ī£Ć£Į£Ō£Ó¶Č¼Ō¤¬½ÅŹ£¤·¤ĘĶųĶѤ¹¤ė²ÄĒ½Ą¤¬¤¢¤ė¤ā¤Ī¤Č¤¹¤ė¤Č”¢ÅģµžÅŌ”Ź£ø£±£¹£²£¹£³£¹£“”ĖĘā¤ĪĮ“ĘüČĀĮ÷¤Ī„攼„ß„Ź„ė¤Ē£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹ ¤Ž¤æ¤Ļ£¹£¹£“£²£¹£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹ ¤Ī¤¤¤ŗ¤ģ¤ņĘžĪĻ¤·¤Ę¤ā”¢£Į„Ó„ė¤Ī£±£°£²¹ę¼¼”Ź»³ÅÄ°ģÉ×”Ė¤ņ»Ų¤¹¤ā¤Ī¤Č¤·¤Ę¤ā”¢£¹£¹£“£±£¹£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹¤Ž¤æ¤Ļ £¹£¹£“£³£¹£±£±£¶£¶£±£±£±£¹£±£°£²£¹£¹£¹¤ņĘžĪĻ¤·¤æ¾ģ¹ē¤Ė¤Ļ”¢Ę±¤øĶųĶŃ¼Ō¤ņ»Ų¤¹²ÄĒ½Ą¤ā¤¢¤ź”¢¤Ž¤æ°ć¤¦ĶųĶŃ¼Ō¤ņ»Ų¤¹²ÄĒ½Ą¤ā¤¢¤ė”£
””¹¹¤Ė³ŗÅö¤Ź¤·¤Ī„؄锼¤Ė¤Ź¤ė²ÄĒ½Ą¤ā¤¢¤ė”£
”Ś£°£°£¹£¹”Ū¼”¤ĖŹĢ„³”¼„É»ŲÄź¤Ī»ČĶŃĪć¤Ė¤Ä¤¤¤Ę掣“£°”¤æŽ£“£±¤ņĶѤ¤¤ĘĄāĢĄ¤¹¤ė”£
””掣“£°¤ĻŹŃ“¹„Ń„æ”¼„ó„³”¼„ɤȤ½¤Ī°ÕĢ£¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣“£°””ŹŃ“¹„Ń„æ”¼„ó„³”¼„ɤȤ½¤Ī°ÕĢ£¤ņĄāĢĄ¤¹¤ėæŽ
””Īć¤Ø¤ŠŹŃ“¹„Ń„æ”¼„ó„³”¼„ɤĪ£±¤Ļ”¢ŹŃ“¹Į°„³”¼„ɤȤ·¤ĘÅÅĻĆČÖ¹ę¤¬»ŲÄź¤µ¤ģ¤ė¤³¤Č¤ņ°ÕĢ£¤¹¤ė”£
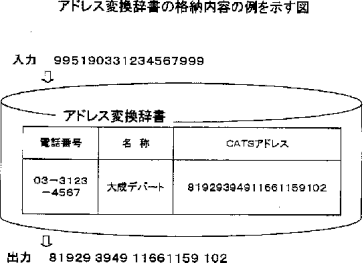
”Ś£°£±£°£°”Ū掣“£±¤Ļ„¢„É„ģ„¹ŹŃ“¹¼½ń¤Ī³ŹĒ¼ĘāĶʤĪĪć¤Ē¤¢¤ė”£
掣“£±””„¢„É„ģ„¹ŹŃ“¹¼½ń¤Ī³ŹĒ¼ĘāĶʤĪĪć¤ņ¼Ø¤¹æŽ
””Īć¤Ø¤Š£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę£¹£¹£µ£±£¹£°£³£³£±£²£³£“£µ£¶£·£¹£¹£¹ ¤¬ĘžĪĻ¤µ¤ģ¤ė¤Č”¢æŽ£“£±¤Ī„¢„É„ģ„¹ŹŃ“¹¼½ń¤ĪĘāĶʤ¬»²¾Č¤µ¤ģ”¢ĀēĄ®„Ē„Ń”¼„ȤĪ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£µ£¹£±£°£² ¤¬„¢„É„ģ„¹ŹŃ“¹²óĻ©¤Ė¤č¤Ć¤Ęµį¤į¤é¤ģ¤ė”£
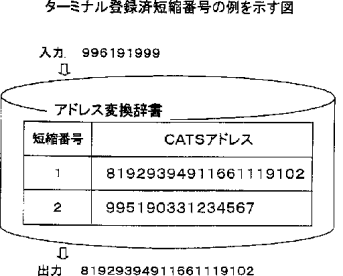
”Ś£°£±£°£±”ŪŗĒøå¤ĖĆ»½Ģ„³”¼„É»ŲÄź¤ĪĄ©øę„³”¼„ɤĪ»ČĶŃĪć¤Ė¤Ä¤¤¤ĘĄāĢĄ¤¹¤ė”£æŽ£“£²¤Ļ¤¢¤ė„攼„ß„Ź„ė¤ĖÅŠĻ椵¤ģ¤Ę¤¤¤ėĆ»½ĢČÖ¹ę¤Č”¢¤½¤ģ¤ĖĀŠ±ž¤¹¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤Ī“Ų·ø¤ņ¼Ø¤¹æŽ¤Ē¤¢¤ė”£
掣“£²””„攼„ß„Ź„ėÅŠĻæŗŃĆ»½ĢČÖ¹ę¤ĪĪć¤ņ¼Ø¤¹æŽ
”Ś£°£±£°£²”ŪĪć¤Ø¤Š„¢„É„ģ„¹£¹£¹£¶£±£¹£±£¹£¹£¹¤Ė¤Ŗ¤¤¤Ę”¢£¹£¹£¶¤Ī¼”¤Ī£±¤¬Ć»½ĢČÖ¹ę¼ļĪą„³”¼„ɤȤ·¤Ę¤Ī„攼„ß„Ź„ėÅŠĻæŗŃĆ»½ĢČÖ¹ę¤ņ¼Ø¤¹¤ā¤Ī¤Č¤¹¤ģ¤Š”¢¶čĄŚ¤źµ¹ę£¹¤Ī¼”¤Ī£±¤¬Ć»½ĢČÖ¹ę¤Ē¤¢¤ź”¢æŽ£“£²¤«¤éĀŠ±ž¤¹¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£±£¹£±£°£²¤Ē¤¢¤ź”¢£Į„Ó„ė¤Ī£±£°£²¹ę¼¼”Ź»³ÅÄ°ģÉ×”Ė¤ņ»Ų¤·¤Ę¤¤¤ė¤³¤Č¤¬Ź¬¤«¤ė”£
”Ś£°£±£°£³”Ū¤Ž¤æ £¹£¹£¶£±£¹£²£¹£¹£¹ ¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘžĪĻ¤Ļ”¢æŽ£“£²¤«¤é”¢æŽ£“£±¤ĖĀŠ±ž¤¹¤ėĪć¤Č¤·¤ĘĄāĢĄ¤·¤æĀēĄ®„Ē„Ń”¼„ȤĪ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘžĪĻ¤Čʱ°ģ¤Č²ņ¼į¤µ¤ģ¤ė”£
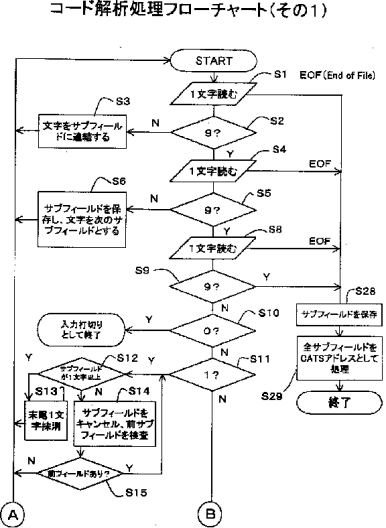
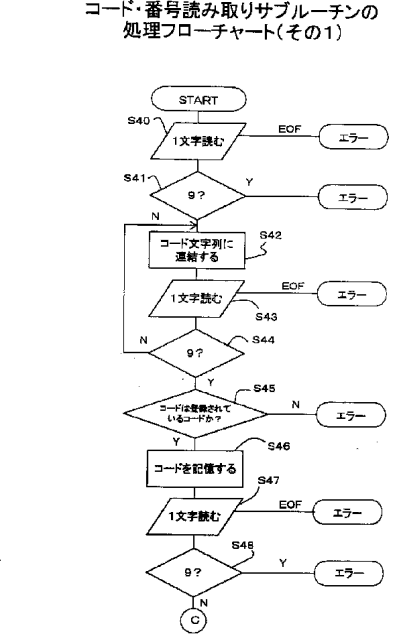
”Ś£°£±£°£“”Ū掣“£³”¤æŽ£“£“¤ĻĄ©øę¶É¤ĖĘžĪĻ¤µ¤ģ¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘÉ¤ß¼č¤ź”¢¤¹¤Ź¤ļ¤Į„³”¼„ɲņĄĻ½čĶż¤Ī„Õ„ķ”¼„Į„ć”¼„ȤĒ¤¢¤ė”£
””””
掣“£³””„³”¼„ɲņĄĻ½čĶż„Õ„ķ”¼„Į„ć”¼„Č”Ź¤½¤Ī£±”Ė
掣“£“””„³”¼„ɲņĄĻ½čĶż„Õ„ķ”¼„Į„ć”¼„Č”Ź¤½¤Ī£²”Ė
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę½čĶż¤¬³«»Ļ¤µ¤ģ¤ė¤Č”¢¤Ž¤ŗ„¹„Ę„Ć„×£Ó£±¤Ē„¢„É„ģ„¹¤ĪŗĒ½é¤ĪŹø»ś¤¬ĘɤŽ¤ģ”¢¤¹¤Ē¤Ė„Õ„”„¤„ė¤ĪŗĒ½Ŗ°ĢĆÖ¤ĖĆ£¤·¤ĘŹø»ś¤ņĘɤį¤Ź¤«¤Ć¤æ¾ģ¹ē”¢¤¹¤Ź¤ļ¤Į„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ī¾ģ¹ē¤Ē¤Ź¤±¤ģ¤Š”¢„¹„Ę„Ć„×£Ó£²¤ĒĘɤŽ¤ģ¤æŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¹¤Ē¤Ź¤±¤ģ¤Š„¹„Ę„Ć„×£Ó£³¤Ē¤½¤ĪŹø»ś¤¬„µ„Ö„Õ„£”¼„ė„É”¢¤¹¤Ź¤ļ¤ĮĘāÉō„į„ā„źĘā¤Ēø½ŗß½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɤņ³ŹĒ¼¤¹¤ėĪĪ°č¤Ė¤¹¤Ē¤ĖĀøŗߤ¹¤ėŹø»ś¤ĖĻ¢·ė¤µ¤ģ¤ė”£
””¤½¤ĪĪĪ°č¤Ė¤Ž¤ĄŹø»ś¤¬³ŹĒ¼¤µ¤ģ¤Ę¤¤¤Ź¤¤¾ģ¹ē¤Ė¤ĻŗĒ½é¤ĪŹø»ś¤Č¤·¤Ę¤½¤ĪĪĪ°č¤Ė³ŹĒ¼¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£°£µ”Ū„¹„Ę„Ć„×£Ó£²¤ĒĘɤŽ¤ģ¤æŹø»ś¤¬£¹¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£“¤Ē¼”¤ĪŹø»ś¤¬£±Źø»śĘɤŽ¤ģ”¢„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£µ¤Ē¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£¶¤Ē„µ„Ö„Õ„£”¼„ė„ɤĪŹŻĀø”¢¤¹¤Ź¤ļ¤Įø½ŗß½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɳŹĒ¼ĪĪ°č¤ĪĘāĶʤ¬ŹŻĀø¤µ¤ģ”¢ĘɤŽ¤ģ¤æŹø»ś¤¬¼”¤Ī„µ„Ö„Õ„£”¼„ė„ɤĖ³ŹĒ¼¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£°£¶”Ū„¹„Ę„Ć„×£Ó£µ¤Ē£¹¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£ø¤Ē¼”¤ĪŹø»ś¤¬£±Źø»śĘɤŽ¤ģ”¢„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£¹¤Ē¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£±£°¤Ē¤½¤ĪŹø»ś¤¬£°¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ¤ė”£
””£°¤Ē¤¢¤ė¾ģ¹ē¤Ė¤ĻĄ©øę„³”¼„ɤȤ·¤Ę£¹£¹£°¤¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢ĘžĪĻĀĒĄŚ¤ź”¢¤¹¤Ź¤ļ¤ĮĘžĪĻ¼č¾Ć¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
”Ś£°£±£°£·”Ū„¹„Ę„Ć„×£Ó£±£°¤Ē£°¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£±£±¤Ē£±¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£±¤Ē¤¢¤ė¾ģ¹ē¤Ė¤ĻĄ©øę„³”¼„ɤȤ·¤Ę£¹£¹£±”¢¤¹¤Ź¤ļ¤Į£±Źø»śøåĀą¤Ī„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£±£²¤Ēø½ŗß½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĘāĶʤ¬£±Źø»ś°Ź¾å¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£±Źø»ś°Ź¾åĀøŗߤ¹¤ė¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£±£³¤Ē¤½¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĖöČų¤Ī£±Źø»ś¤¬Ėõ¾Ć¤µ¤ģ¤æøå¤Ė”¢„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£°£ø”Ū„¹„Ę„Ć„×£Ó£±£²¤Ē„µ„Ö„Õ„£”¼„ė„ɤ¬£±Źø»ś°Ź¾å¤Ē¤Ź¤¤”¢¤¹¤Ź¤ļ¤Į„µ„Ö„Õ„£”¼„ė„ɤņ³ŹĒ¼¤¹¤Ł¤ĪĪ°č¤ĖŹø»ś¤¬¤Ž¤ĄĀøŗߤ·¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£±£“¤Ē¤½¤Ī„µ„Ö„Õ„£”¼„ė„É”¢¤¹¤Ź¤ļ¤ĮĘāÉō„į„ā„ź¤Ė³ĪŹŻ¤µ¤ģ¤Ę¤¤¤ėø½ŗß½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„„ć„ó„»„ė¤µ¤ģ”¢¶čĄŚ¤źµ¹ę¤ĪĮ°¤ĪľĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬ø”ŗŗ¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±£µ¤Ē¤½¤ĪĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬Āøŗߤ¹¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢Āøŗߤ¹¤ė¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£±£²°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ”¢Āøŗߤ·¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
””¤³¤Ī„¹„Ę„Ć„×£Ó£±£²”Į£Ó£±£µ¤Ī½čĶż¤Ė¤Ä¤¤¤Ę¤Ļ¶ńĀĪĪć¤ņĶѤ¤¤Ę¹¹¤Ėøå½Ņ¤¹¤ė”£
”Ś£°£±£°£¹”Ū掣“£³¤Ī„¹„Ę„Ć„×£Ó£±£±¤Ē£±¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢æŽ£“£“¤Ī„¹„Ę„Ć„×£Ó£±£¶¤Ē£²¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£²¤Ē¤¢¤ė¾ģ¹ē¤Ė¤ĻĄ©øę„³”¼„ɤȤ·¤Ę£¹£¹£²”¢¤¹¤Ź¤ļ¤Į£±„µ„Ö„Õ„£”¼„ė„ÉøåĀą¤ĪĄ©øę„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£±£·¤Ēø½ŗß½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬£±Źø»ś°Ź¾å¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£±Źø»ś°Ź¾å¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£±£ø¤Ē¤½¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„Æ„ź„¢¤µ¤ģ¤æøå¤Ė”¢„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£±£°”Ū„¹„Ę„Ć„×£Ó£±£·¤Ē„µ„Ö„Õ„£”¼„ė„ɤ¬£±Źø»ś°Ź¾å¤Ē¤Ź¤¤”¢¤¹¤Ź¤ļ¤Į£°Źø»ś¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£±£“¤ČʱĶĶ¤Ė„¹„Ę„Ć„×£Ó£±£¹¤Ē„µ„Ö„Õ„£”¼„ė„ɤ¬„„ć„ó„»„ė¤µ¤ģ”¢Į°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬ø”ŗŗ¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£²£°¤ĒĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬Āøŗߤ¹¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢Āøŗߤ¹¤ė¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£±£·°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ”¢Āøŗߤ·¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
””¤³¤Ī„¹„Ę„Ć„×£Ó£±£·”Į£Ó£²£°¤Ī½čĶż¤Ė¤Ä¤¤¤Ę¤ā”¢¶ńĀĪĪć¤ņĶѤ¤¤Ęøå½Ņ¤¹¤ė”£
”Ś£°£±£±£±”Ū„¹„Ę„Ć„×£Ó£±£¶¤Ē£²¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£²£±¤Ē£³¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£³¤Ē¤¢¤ė¾ģ¹ē¤ĖĄ©øę„³”¼„ɤȤ·¤ĘĄčʬ¤«¤éŗĘĘžĪĻ¤ĪĄ©øę„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£²£²¤ĒĮ“„µ„Ö„Õ„£”¼„ė„ɤ¬„Æ„ź„¢¤µ¤ģ¤æøå¤Ė”¢„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£±£²”Ū„¹„Ę„Ć„×£Ó£²£±¤Ē£³¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£²£³¤Ē£“¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£“¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ£Ć£Į£Ō£Ó¶Č¼Ō»ŲÄź¤ĪĄ©øę„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£²£“¤Ē£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ÉĘÉ¼č¤ź½čĶż”Ź„µ„Ö„ė”¼„Į„ó”Ė¤¬¹Ō¤ļ¤ģ¤æøå¤Ė”¢„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
””¤³¤Ī£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ÉĘÉ¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ė¤Ä¤¤¤Ę¤Ļøå½Ņ¤¹¤ė”£
”Ś£°£±£±£³”Ū„¹„Ę„Ć„×£Ó£²£³¤Ē£“¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£²£µ¤Ē£µ¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ¤ė”£
””£µ¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢ŹĢ„³”¼„É»ŲÄź¤ĪĄ©øę„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£²£¶¤Ē„³”¼„É”¦ČÖ¹ęĘÉ¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż¤¬¼Ā¹Ō¤µ¤ģ”¢½čĶż¤ņ½ŖĪ»¤¹¤ė”£
””¤³¤Ī„µ„Ö„ė”¼„Į„ó¤Ė¤Ä¤¤¤Ę¤āøå½Ņ¤¹¤ė”£
”Ś£°£±£±£“”Ū„¹„Ę„Ć„×£Ó£²£µ¤Ē£µ¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£²£·¤Ē£¶¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¶¤Ē¤¢¤ė¾ģ¹ē¤Ė¤ĻĆ»½Ģ„³”¼„É»ŲÄź¤ĪĄ©øę„³”¼„ɤ¬ø½¤ļ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢Į°½Ņ¤ČʱĶĶ¤Ė„¹„Ę„Ć„×£Ó£²£¶¤Ī½čĶż”¢¤¹¤Ź¤ļ¤Į„³”¼„É”¦ČÖ¹ęĘÉ¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż¤¬¹Ō¤ļ¤ģ¤æøå¤Ė”¢½čĶż¤ņ½ŖĪ»¤¹¤ė”£
””¤Ž¤æ£¶¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„؄锼¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
”Ś£°£±£±£µ”Ū掣“£³¤Ī„¹„Ę„Ć„×£Ó£±”¤£Ó£“”¢¤Ŗ¤č¤Ó£Ó£ø¤Ē„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė”¢¤¹¤Ź¤ļ¤Į„Õ„”„¤„ė¤Ī½Ŗ¤ļ¤ź¤ĖĆ£¤·¤Ę¤¤¤ė¤ČČ½Äź¤µ¤ģ¤æ¾ģ¹ē”¢¤Ŗ¤č¤Ó„¹„Ę„Ć„×£Ó£¹¤Ē£¹”¢¤¹¤Ź¤ļ¤ĮĄ©øę„³”¼„ɤȤ·¤ĘĘžĪĻ½ŖĪ»¤Ī£¹£¹£¹¤¬ø½¤ļ¤ģ¤æ¤ČČ½Äź¤µ¤ģ¤æ¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£²£ø¤Ēø½ŗß½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĘāĶʤ¬ŹŻĀø¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£²£¹¤ĒĮ“¤Ę¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤µ¤ģ¤Ę”¢½čĶż¤ņ½ŖĪ»¤¹¤ė”£
”Ś£°£±£±£¶”Ū掣“£µ¤Ļ”¢æŽ£“£³¤Ī„¹„Ę„Ć„×£Ó£±£²”Į£Ó£±£µ¤Ī½čĶż”¢¤¹¤Ź¤ļ¤Į£±Źø»śøåĀą¤Ī½čĶż¤Ī¶ńĀĪĪć¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣“£µ””£±Źø»śøåĀą¤Ī½čĶż¤Ī¶ńĀĪĪć¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę„µ„Ö„Õ„£”¼„ė„ɤĪĘāĶʤņ³ŹĒ¼¤¹¤ėĘāÉō„į„ā„ź¤Č„攼„ß„Ź„ė¤Ī²čĢĢɽ¼Ø¤ņĶѤ¤¤Ę”¢¶ńĀĪĪć¤Ī½čĶż¤Ė¤Ä¤¤¤ĘĄāĢĄ¤¹¤ė”£
”Ś£°£±£±£·”Ū£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę£±£²£¹£³£“£¹£µ¤¬ĘžĪĻ¤µ¤ģ¤ė¤Č”¢ĘāÉō„į„ā„ź¤Ė¤Ļ£³¤Ä¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĘāĶʤȤ·¤Ę£±£²”¤£³£“”¤¤Ŗ¤č¤Ó£µ¤¬³ŹĒ¼¤µ¤ģ¤Ę¤¤¤ė”£
””¤³¤³¤Ē£¹£¹£±¤¬ĘžĪĻ¤µ¤ģ¤ė¤Č”¢ŗĒøå¤Ī„µ„Ö„Õ„£”¼„ė„É”¢¤¹¤Ź¤ļ¤Į½čĶżĆę¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĘāĶʤ¬£±Źø»ś¤¢¤ė¤æ¤į”¢æŽ£“£³¤Ī„¹„Ę„Ć„×£Ó£±£³¤ĒĖöČų£±Źø»ś”¢¤¹¤Ź¤ļ¤Į£µ¤¬Ėõ¾Ć¤µ¤ģ¤æ¾õĀÖ¤Ė¤Ź¤ė”£
””¼”¤Ė£¹£¹£±¤¬¤ā¤¦°ģÅŁĘžĪĻ¤µ¤ģ¤ė¤Č”¢„¹„Ę„Ć„×£Ó£±£²¤Ē„µ„Ö„Õ„£”¼„ė„ɤ¬£±Źø»ś°Ź¾åĀøŗߤ·¤Ź¤¤¤ČČ½Äź¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±£“¤Ē¤½¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„„ć„ó„»„ė¤µ¤ģ”¢¤½¤ĪĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬ø”ŗŗ¤µ¤ģ¤Ę”¢„¹„Ę„Ć„×£Ó£±£µ¤Ē¤½¤ĪĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬Āøŗߤ¹¤ė¤ČČ½Äź¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±£²¤Ē„µ„Ö„Õ„£”¼„ė„ɤ¬£±Źø»ś°Ź¾å¤Ē¤¢¤ė¤ČČ½Äź¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±£³¤ĒĖöČų£±Źø»ś”¢¤¹¤Ź¤ļ¤Į£“¤¬Ėõ¾Ć¤µ¤ģ¤æ¾õĀ֤ȤŹ¤ė”£
”Ś£°£±£±£ø”Ū£¹£¹£±¤¬¼””¹¤ČĘžĪĻ¤µ¤ģ”¢¤³¤Ī¤č¤¦¤Ź½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė¤Č”¢ŗĒ½ŖÅŖ¤ĖĮ“¤Ę¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„„ć„ó„»„ė¤µ¤ģ¤æ¾õĀ֤ȤŹ¤ė¤¬”¢„¹„Ę„Ć„×£Ó£±£µ¤ĒĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬Āøŗߤ·¤Ź¤¤¾ģ¹ē¤Ė¤ā„¹„Ę„Ć„×£Ó£±°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė¤æ¤į”¢¼Ā¼ĮÅŖ¤ĖĘžĪĻ¤·¤¹¤®¤Ī£¹£¹£±¤ĖĀŠ¤·¤Ę¤Ļ²æ¤é¤Ī½čĶż¤ā¹Ō¤ļ¤ģ¤Ź¤¤¤Č¤¤¤¦¾õĀ֤ȤŹ¤ė”£
””¤³¤Ī¤č¤¦¤Ź¾ģ¹ē”¢¤¹¤Ź¤ļ¤ĮĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬Āøŗߤ·¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„؄锼¤Č¤¹¤ė¤č¤¦¤Ė„Õ„ķ”¼„Į„ć”¼„ȤņŗīĄ®¤¹¤ė¤³¤Č¤āÅöĮ³²ÄĒ½¤Ē¤¢¤ė”£
””¤Ź¤Ŗ¶čĄŚ¤źµ¹ę¤Č¤·¤Ę¤Ī£¹¤ĻĘāÉō„į„ā„ź¤Ė¤Ļ³ŹĒ¼¤µ¤ģ¤Ź¤¤¤æ¤į”¢øåĀą¤Ē£¹¤¬¾Ć¤µ¤ģ¤ė¤č¤¦¤Ź¤³¤Č¤Ļ¤Ź¤Æ”¢£¹¤¬Čō¤Š¤µ¤ģ¤Ę¤½¤ĪĮ°¤Ī„µ„Ö„Õ„£”¼„ė„ɤĪĖöČų¤ĪŹø»ś¤ĖĀŠ¤¹¤ė½čĶż¤¬¹Ō¤ļ¤ģ¤ė”£
””¤Ž¤æ£¹£¹£±¤Č¤¤¤¦Ą©øę„³”¼„ɤņĘžĪĻ¤¹¤ėĀå¤ļ¤ź¤Ė”¢„ę”¼„¶¤ĻĪć¤Ø¤Š„Š„Ć„Æ„¹„Ś”¼„¹¤Ī„”¼¤ņ²”¤¹¤³¤Č¤Ė¤č¤Ć¤Ę”¢£¹£¹£±¤ņĘžĪĻ¤·¤æ¤ČĮ“¤Æʱ¤øøś²Ģ¤ņ»ż¤æ¤»¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£±£±£¹”Ū掣“£¶¤Ļ掣“£“¤Ī„¹„Ę„Ć„×£Ó£±£·”Į£Ó£²£°¤Ī½čĶż¤Ī¶ńĀĪĪć¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣“£¶””£±„µ„Ö„Õ„£”¼„ė„ÉøåĀą½čĶż¤Ī¶ńĀĪĪć¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę£±£²£¹£³£“£¹£µ¤¬ĘžĪĻ¤µ¤ģ¤æ¤ā¤Ī¤Č¤·¤Ę”¢¶ńĀĪĪć¤ņĄāĢĄ¤¹¤ė”£
”Ś£°£±£²£°”Ū£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬ĘžĪĻ¤µ¤ģ¤æøå¤ĖĄ©øę„³”¼„É£¹£¹£²¤¬ĘžĪĻ¤µ¤ģ¤ė¤Č”¢æŽ£“£“¤Ī„¹„Ę„Ć„×£Ó£±£ø¤ĒĀč£³¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„Æ„ź„¢¤µ¤ģ”¢¼”¤Ė£¹£¹£²¤¬ĘžĪĻ¤µ¤ģ¤ė¤Č„¹„Ę„Ć„×£Ó£±£¹¤ĒĀč£³¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„„ć„ó„»„ė¤µ¤ģ¤Ę”¢„¹„Ę„Ć„×£Ó£²£°¤ĒĮ°¤Ī„µ„Ö„Õ„£”¼„ė„É”¢¤¹¤Ź¤ļ¤ĮĀč£²„µ„Ö„Õ„£”¼„ė„ɤ¬Āøŗߤ¹¤ė¤ČČ½Äź¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£±£ø¤ĒĀč£²¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„Æ„ź„¢¤µ¤ģ¤ė”£
””°Źø壹£¹£²¤¬ĘžĪĻ¤µ¤ģ¤ė¤æ¤Ó¤ĖʱĶĶ¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
””¤³¤³¤Ē¤ā£¹£¹£²¤Ī£³Źø»ś¤ĪĘžĪĻ¤ĪĀå¤ļ¤ź¤Ė”¢„ę”¼„¶¤¬„·„Õ„Č”Ż„Š„Ć„Æ„¹„Ś”¼„¹¤Ī„”¼¤ņ²”¤¹¤³¤Č¤Ė¤č¤Ć¤ĘʱĶĶ¤Īøś²Ģ¤ņĄø¤ŗ¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£±£²£±”Ū掣“£·¤Ļ掣“£“¤Ī„¹„Ę„Ć„×£Ó£²£“”¢¤¹¤Ź¤ļ¤Į£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ÉĘÉ¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż„Õ„ķ”¼„Į„ć”¼„ȤĒ¤¢¤ė”£
掣“£·””£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ÉĘÉ¤ß¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż„Õ„ķ”¼„Į„ć”¼„Č
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę½čĶż¤¬³«»Ļ¤µ¤ģ¤ė¤Č”¢¤Ž¤ŗ„¹„Ę„Ć„×£Ó£³£±¤Ē£±Źø»ś„³”¼„ɤ¬ĘɤŽ¤ģ”¢„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£³£²¤Ē¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£³£³¤Ē¤½¤ĪŹø»ś¤¬„³”¼„ÉŹø»śĪó¤ĖĻ¢·ė¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£³£“¤Ē¼”¤Ī£±Źø»ś¤¬ĘɤŽ¤ģ”¢„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£³£µ¤Ē¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£³£³°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£²£²”Ū掣³£¹¤Ē¤Ļ£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ɤȤ·¤Ę£±·å¤Ą¤±¤Ī„³”¼„ɤņ¼Ø¤·¤Ę¤¤¤ė¤¬”¢°ģČĢÅŖ¤Ė¤Ļ¤³¤Ī„³”¼„ɤĻ£²·å°Ź¾å¤ĪŹø»śĪó¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£³£³”Į£Ó£³£µ¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£²£³”Ū„¹„Ę„Ć„×£Ó£³£µ¤Ē£¹¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢¶čĄŚ¤ź„³”¼„ɤĖĆ£¤·¤Ę£Ć£Į£Ō£Ó¶Č¼Ō„³”¼„ɤ¬ĘĄ¤é¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£³£¶¤Ē¤½¤Ī„³”¼„ɤ¬ÅŠĻ椵¤ģ¤Ę¤¤¤ė„³”¼„ɤ«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢ÅŠĻ椵¤ģ¤Ę¤¤¤ė¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£³£·¤Ē¤½¤Ī„³”¼„ɤ¬µ²±¤µ¤ģ¤æøå¤Ė”¢½čĶż¤¬„µ„Ö„ė”¼„Į„ó¤ĪĢį¤źĄč¤Ė„ź„攼„󤹤ė”£
”Ś£°£±£²£“”Ū„¹„Ę„Ć„×£Ó£³£±”¤£Ó£³£“¤Ē„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤¢¤ė¾ģ¹ē”¢„¹„Ę„Ć„×£Ó£³£²¤ĒŗĒ½é¤ĖĘɤŽ¤ģ¤æŹø»ś¤¬£¹¤Ē¤¢¤ė¾ģ¹ē”¢¤Ŗ¤č¤Ó„¹„Ę„Ć„×£Ó£³£¶¤ĒÅŠĻ椵¤ģ¤Ę¤¤¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢Į“¤Ę„؄锼¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
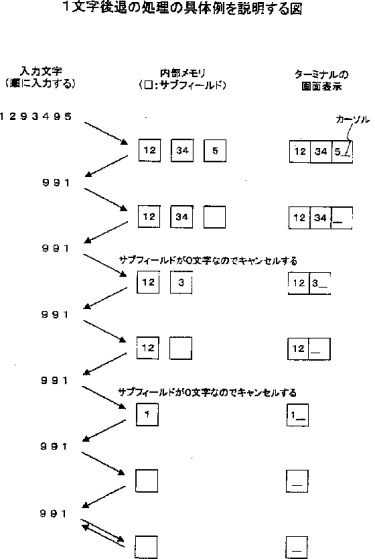
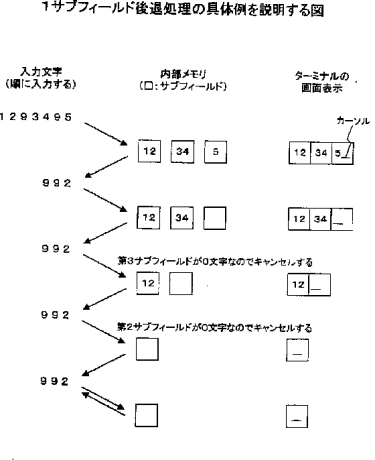
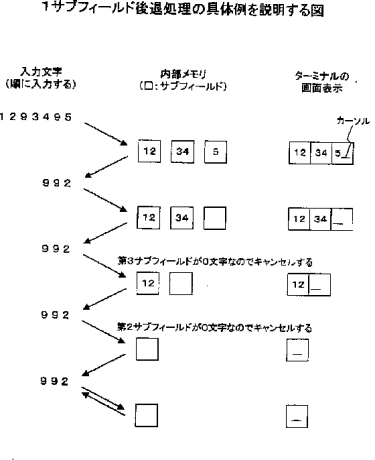
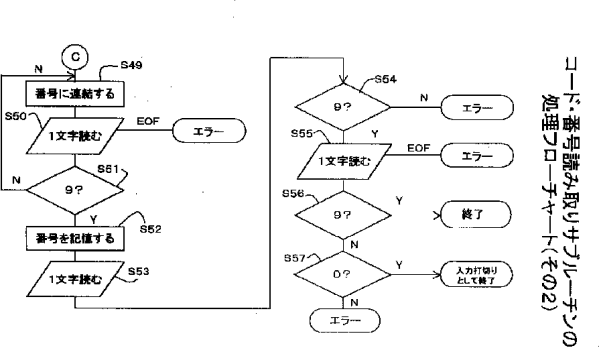
”Ś£°£±£²£µ”Ū¼”¤Ė掣“£ø”¤æŽ£“£¹¤Ļ掣“£“¤Ī„¹„Ę„Ć„×£Ó£²£¶”¢¤¹¤Ź¤ļ¤Į„³”¼„É”¦ČÖ¹ęĘÉ¤ß¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż„Õ„ķ”¼„Į„ć”¼„ȤĒ¤¢¤ė”£
掣“£ø””„³”¼„É”¦ČÖ¹ęĘÉ¤ß¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż„Õ„ķ”¼„Į„ć”¼„Č”Ź¤½¤Ī£±”Ė
””””””””””””””
””””””””””””””掣“£¹””„³”¼„É”¦ČÖ¹ęĘÉ¤ß¼č¤ź„µ„Ö„ė”¼„Į„ó¤Ī½čĶż„Õ„ķ”¼„Į„ć”¼„Č”Ź¤½¤Ī£²”Ė
”” ””¤³¤Ī„µ„Ö„ė”¼„Į„ó¤Ļ”¢Į°½Ņ¤Ī¤č¤¦¤ĖĄ©øę„³”¼„ɤȤ·¤Ę£¹£¹£µ¤ĪŹĢ„³”¼„É»ŲÄź”¢¤Ž¤æ¤Ļ£¹£¹£¶¤ĪĆ»½Ģ„³”¼„É»ŲÄź¤Ī„³”¼„ɤ¬É½¤ģ¤æ»ž¤Ė”¢ŹŃ“¹„Ń„æ”¼„ó„³”¼„É”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¼ļĪą„³”¼„ɤņµ²±¤¹¤ė¤Č¶¦¤Ė”¢ŹŃ“¹Į°„³”¼„É”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤ņµ²±¤¹¤ė¤æ¤į¤Ī½čĶż„Õ„ķ”¼„Į„ć”¼„ȤĒ¤¢¤ė”£
”Ś£°£±£²£¶”Ū掣“£ø¤Ė¤Ŗ¤¤¤Ę½čĶż¤¬³«»Ļ¤µ¤ģ¤ė¤Č”¢¤Ž¤ŗ„¹„Ę„Ć„×£Ó£“£°¤Ē£±Źø»śĘɤą½čĶż¤¬¹Ō¤ļ¤ģ”¢„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£“£±¤Ē¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ¤ė”£
””£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢¤½¤ĪŹø»ś¤¬¶čĄŚ¤źµ¹ę¤Ē¤Ź¤Æ”¢ŹŃ“¹„Ń„æ”¼„ó„³”¼„É”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¼ļĪą„³”¼„ɤĪ¤¤¤ŗ¤ģ¤«¤ĪĄčʬ¤ĪŹø»ś¤Ē¤¢¤ė¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£“£²¤Ē¤½¤ĪŹø»ś¤¬„³”¼„ÉŹø»śĪó¤ĖĻ¢·ė¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£“£³¤Ē¼”¤Ī£±Źø»ś¤¬ĘɤŽ¤ģ¤ė”£
””¼”¤Ī£±Źø»ś¤¬„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£“£“¤Ē¤½¤ĪŹø»ś¤¬¶čĄŚ¤źµ¹ę¤Č¤·¤Ę¤Ī£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ¤ė”£
””£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£“£²°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£²£·”Ū„¹„Ę„Ć„×£Ó£“£“¤Ē£¹”¢¤¹¤Ź¤ļ¤Į¶čĄŚ¤źµ¹ę¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ„³”¼„ɤ¬Ęɤ߼č¤é¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤Ī¤Ē”¢„¹„Ę„Ć„×£Ó£“£µ¤Ē¤½¤Ī„³”¼„ɤ¬ÅŠĻ椵¤ģ¤Ę¤¤¤ė„³”¼„ɤĒ¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢ÅŠĻ椵¤ģ¤Ę¤¤¤ė¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£“£¶¤Ē¤½¤Ī„³”¼„ɤ¬µ²±¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£“£·¤Ē¼”¤Ī£±Źø»ś¤ņĘɤą½čĶż¤¬¹Ō¤ļ¤ģ¤ė”£
””¤½¤Ī·ė²Ģ”¢„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢„¹„Ę„Ć„×£Ó£“£ø¤Ē¤½¤ĪŹø»ś¤¬¶čĄŚ¤źµ¹ę¤Ī£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ¤ė”£
”Ś£°£±£²£ø”Ū£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤ĻŹŃ“¹Į°„³”¼„É”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤ĪŗĒ½é¤Ī£±Źø»ś¤¬ĘɤŽ¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢æŽ£“£¹¤Ī„¹„Ę„Ć„×£Ó£“£¹¤Ē¤½¤ĪŹø»ś¤¬ČÖ¹ę¤ĖĻ¢·ė¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£µ£°¤Ē¼”¤Ī£±Źø»ś¤¬ĘɤŽ¤ģ¤ė”£
””¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬„¹„Ę„Ć„×£Ó£µ£±¤ĒČ½Äź¤µ¤ģ”¢£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£“£¹°Ź¹ß¤Ī½čĶż¤¬·«¤źŹÖ¤µ¤ģ¤ė”£
”Ś£°£±£²£¹”Ū„¹„Ę„Ć„×£Ó£µ£±¤Ē£¹¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢ŹŃ“¹Į°„³”¼„É”¢¤Ž¤æ¤ĻĆ»½ĢČÖ¹ę¤¬¤¹¤Ē¤ĖĘɤ߼č¤é¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤į”¢„¹„Ę„Ć„×£Ó£µ£²¤Ē¤½¤ĪČÖ¹ę¤¬µ²±¤µ¤ģ”¢„¹„Ę„Ć„×£Ó£µ£³¤Ē¼”¤Ī£±Źø»ś¤¬ĘɤŽ¤ģ¤ė”£
””„¹„Ę„Ć„×£Ó£µ£“¤Ē¼”¤Ī£±Źø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£¹¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£µ£µ¤Ē¼”¤Ī£±Źø»ś¤¬ĘɤŽ¤ģ”¢¹¹¤Ė„¹„Ę„Ć„×£Ó£µ£¶¤Ē¤½¤ĪŹø»ś¤¬£¹¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ¤ė”£
””£¹¤Ē¤¢¤ė¾ģ¹ē¤Ė¤Ļ”¢ĘžĪĻ½ŖĪ»¤ņ¼Ø¤¹Ą©øę„³”¼„ɤȤ·¤Ę¤Ī£¹£¹£¹¤¬ø½¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤Ī¤Ē”¢¤½¤Ī¤Ž¤Ž½čĶż¤ņ½ŖĪ»¤¹¤ė”£
””£¹¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ„¹„Ę„Ć„×£Ó£µ£·¤Ē£°¤Ē¤¢¤ė¤«ČŻ¤«¤¬Č½Äź¤µ¤ģ”¢£°¤Ē¤¢¤ė¾ģ¹ē¤Ė¤ĻĘžĪĻĀĒĄŚ¤ź”Ź¼č¾Ć¤·”Ė¤ĪĄ©øę„³”¼„ɤȤ·¤Ę¤Ī£¹£¹£°¤¬ø½¤ģ¤æ¤³¤Č¤Ė¤Ź¤ė¤æ¤įĘžĪĻĀĒĄŚ¤ź¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
”Ś£°£±£³£°”Ū„¹„Ę„Ć„×£Ó£“£°”¤£Ó£“£³”¤£Ó£“£·”¤£Ó£µ£°”¢¤Ŗ¤č¤Ó£Ó£µ£µ¤Ē„Ø„ó„É„Ŗ„Ö„Õ„”„¤„ė”¢¤¹¤Ź¤ļ¤Į„Õ„”„¤„ė¤ĪŗĒøå¤ĖĆ£¤·”¢Ęɤą¤Ł¤Źø»ś¤¬¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢Į“¤Ę„؄锼¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
””¤Ž¤æ„¹„Ę„Ć„×£Ó£“£±”¤£Ó£“£ø¤ĒĘɤŽ¤ģ¤æŹø»ś¤¬£¹¤Ē¤¢¤ė¾ģ¹ē”¢„¹„Ę„Ć„×£Ó£µ£“¤Ē£¹¤Ē¤Ź¤¤¾ģ¹ē”¢„¹„Ę„Ć„×£Ó£µ£·¤Ē£°¤Ē¤Ź¤¤¾ģ¹ē¤Ė¤Ļ¤¤¤ŗ¤ģ¤ā„؄锼¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
””¹¹¤Ė„¹„Ę„Ć„×£Ó£“£µ¤ĒĘɤŽ¤ģ¤æ„³”¼„ɤ¬ÅŠĻ椵¤ģ¤Ę¤¤¤Ź¤¤¾ģ¹ē¤Ė¤ā”¢„؄锼¤Č¤·¤Ę½čĶż¤ņ½ŖĪ»¤¹¤ė”£
”Ś£°£±£³£±”Ū£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę¤Ļ”¢„¢„É„ģ„¹¤Ī¼č¤źĘĄ¤ėæōĆĶ¶õ“ÖĆę¤ņĻ¢Ā³ÅŖ¤Ė»ČĶѤ»¤ŗ”¢Īć¤Ø¤ŠĘĆÄź¤Ī„Õ„”„¤„ė¤Ė¤½¤ĪĆĶ·²¤¬³ŹĒ¼¤µ¤ģ¤ėÉōŹ¬¶õ“Ö¤Ī¤ß¤ņ”¢¤Ž¤æ¤ĻĘĆÄź¤Īµ¬Ā§¤Ē¼±ŹĢ¤Ē¤¤ėÉōŹ¬¶õ“Ö¤Ī¤ß¤ņ»ČĶѤ¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
””¤³¤ģ¤Ė¤č¤Ć¤ĘĶųĶŃ¼Ō”¢¤Ž¤æ¤Ļ·×»»µ”„·„¹„Ę„ą¤«¤é¼õ¤±ÉÕ¤±¤æ„¢„É„ģ„¹¤Ī°ģÉō¤¬øķ¤Ć¤Ę¤¤¤ė»ž”¢¤ā¤·¤Æ¤Ļ°ģÉō¤¬·ē¤±¤Ę¤¤¤ė»ž”¢¤ā¤·¤Æ¤ĻĶ¾·×¤ŹÉōŹ¬¤¬ÉÕ¤±²Ć¤Ø¤é¤ģ¤Ę¤¤¤ė¾ģ¹ē¤Ė¤Ļ”¢„؄锼°·¤¤¤Č¤·¤Ę„¢„É„ģ„¹¤¬øķ¤Ć¤æ¤Ž¤Ž¤ĪČĀĮ÷½čĶż¤ņĆę»ß¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£±£³£²”Ū¤½¤Ī¤č¤¦¤Ź¾ģ¹ē¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę”¢„Į„§„Ć„Æ„³”¼„ɤņ“Ž¤ó¤Ą¼”¤Ī¤č¤¦¤Ź„¢„É„ģ„¹¤ņ¹Ķ¤Ø¤ė”£
””£ø£±£¹£²£¹£³£¹£“£¹£±£±£¶£¶£±£±£±£¹£±£°£²£ø£¹£¹£¹¤³¤ĪĪć¤Ē”¢ĘžĪĻ“°Ī»¤ņ¼Ø¤¹Ą©øę„³”¼„ɤȤ·¤Ę¤Ī£¹£¹£¹¤ĪĮ°¤Ī£ø¤Ļ„Į„§„Ć„Æ„³”¼„ɤĒ¤¢¤ė”£
””¤³¤Ī„Į„§„Ć„Æ„³”¼„ɤĪĘāĶʤ¬”¢¤½¤ģ°ŹĮ°¤Ī¶čĄŚ¤źµ¹ę£¹¤ņ½ü¤ÆĮ“¤Ę¤Īæō»ś¤ņ²Ć¤Ø¤Ę£±£°¤Ē³ä¤Ć¤æĶ¾¤ź¤Č°ģĆפ¹¤ģ¤Š”¢Ąµ¤·¤¤£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ņɽ¤¹¤ā¤Ī¤Č²ņ¼į¤¹¤ė”£
””¤³¤ĪĪć¤Ē¤ĻĮ“¤Ę¤Īæō»ś¤ņ²Ć¤Ø¤ė¤Č£ø”Ü£±”Ü£²”Ü£³”Ü£“”Ü£±”Ü£±”Ü£¶”Ü£¶”Ü£±”Ü£±”Ü£±”Ü£±”Ü£°”Ü£²”į£³£ø¤Č¤Ź¤ź”¢£±£°¤Ē³ä¤Ć¤æĶ¾¤ź¤Ļ£ø¤Č¤Ź¤Ć¤Ę”¢„Į„§„Ć„Æ„³”¼„ɤĪ£ø¤Č°ģĆפ¹¤ė”£
”Ś£°£±£³£³”Ū¤³¤ĪĪć¤Ē¤Ļ„Į„§„Ć„Æ„³”¼„ɤņ“Ž¤ą£±£°£²£ø¤¬£Į„Ó„ė£±£°£²¹ę¼¼”Ź»³ÅÄ°ģÉ×”Ė¤Ī„¢„É„ģ„¹¤ĪĖöČų¤Ē¤¢¤ź”¢Ą©øę¶É¤ĻĮ°½Ņ¤Ī·×»»¤ņ¹Ō¤Ć¤Ę„Į„§„Ć„Æ„³”¼„ɤȰģĆפ·¤Ź¤¤¾ģ¹ē¤Ė¤Ļ”¢£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘžĪĻ„ß„¹¤¬¤¢¤Ć¤æ¤ČČ½Äź¤·”¢„؄锼¤Č¤·¤ĘČĀĮ÷½čĶż¤ņĆęĆĒ¤¹¤ė”£
”Ś£°£±£³£“”Ū£±£°£²¹ę¼¼¤ĖĀŠ¤·¤ĘŗĒøå¤Ī„µ„Ö„Õ„£”¼„ė„ɤņ£±£°£²£°”Į£±£°£²£¹¤Ī£±£°ÄĢ¤ź¤Č¤¹¤ė¤³¤Č¤¬²ÄĒ½¤Ē¤¢¤ė¤¬”¢¤³¤Ī¤¦¤ĮĄµ¤·¤¤£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤Ę¤Ļ£±£°£²£ø¤Ī¤ß¤ņŗĪĶѤ¹¤ė¤ā¤Ī¤Č¤·”¢Ā¾¤Ī¤ā¤Ī¤ņĮ“¤Ę„؄锼¤Č¤¹¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢ĘžĪĻ„ß„¹¤äÅĮĮ÷„؄锼¤ņø”½Š¤¹¤ė¤³¤Č¤¬ĶʰפȤŹ¤ė”£
””¤¹¤Ź¤ļ¤Į£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖĀŠ¤·¤Ę¾éÄ¹ÅŁ¤ņĄß¤±¤Ę”¢°ģÉō¤ĪĆĶ¤Ī¤ß¤¬Ąµ¤·¤¤¤ā¤Ī¤Č¤¹¤ė¤³¤Č¤Ė¤Ź¤ė”£
”Ś£°£±£³£µ”Ū¤³¤Ī¤č¤¦¤ĖÉōŹ¬¶õ“Ö¤Ī¤ß¤ņ»ČĶѤ¹¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ī¤½¤ĪĀ¾¤ĪĪć¤Č¤·¤Ę¤Ļ”¢Ą©øę¶É¤¬„¢„É„ģ„¹”¢¤Ž¤æ¤Ļ¤½¤Ī„µ„Ö„Õ„£”¼„ė„ɤņ„Ē”¼„æ„Ł”¼„¹¤ĖÅŠĻ椹¤ė»ž¤Ė”¢£²£°·å¤ĪĶšæō¤ņČÆĄø¤·¤Ę„¢„É„ģ„¹¤ņÅŠĻ椹¤ė¤č¤¦¤Ė¤·”¢ĶųĶŃ¼Ō¤Ļ¤³¤ĪĶšæō¤ņ£Ć£Į£Ō£Ó„¢„É„ģ„¹”¢¤Ž¤æ¤Ļ¤½¤Ī„µ„Ö„Õ„£”¼„ė„ɤȤ·¤Ę»ČĶѤ¹¤ė¤č¤¦¤ŹĪ椬¹Ķ¤Ø¤é¤ģ¤ė”£
””Ą©øę¶É¤ĻĶųĶŃ¼Ō¤«¤éĘžĪĻ¤µ¤ģ¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹”¢¤Ž¤æ¤Ļ¤½¤Ī„µ„Ö„Õ„£”¼„ė„ɤ¬„Ē”¼„æ„Ł”¼„¹¤ĖÅŠĻ椵¤ģ¤Ę¤¤¤ģ¤Š”¢¤½¤Ī„¢„É„ģ„¹¤ĖĀŠ±ž¤¹¤ė½čĶż¤ņĀ³¹Ō¤·”¢¤Ź¤±¤ģ¤Š„؄锼¤Č¤·¤Ę½čĶż¤ņĆęĆĒ¤¹¤ė”£
”Ś£°£±£³£¶”Ū²¾¤Ė£±£°¤Ī£¶¾čøĤĪ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬ÅŠĻ椵¤ģ¤Ę¤¤¤ė¤Č¤¹¤ė¤Č”¢£±£°¤Ī£²£°¾č¤Ī¶õ“ÖĆę¤Ī£±£°¤Ī£¶¾čøĤĄ¤±¤ĻÅŠĻ椵¤ģ¤Ę¤¤¤ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ē¤¢¤ź”¢„¢„É„ģ„¹¤ĪĘžĪĻ„ß„¹”¢¤Ž¤æ¤ĻÅĮĮ÷„؄锼¤ņø”½Š¤·¤ä¤¹¤Æ¤Ź¤ė”£
””Īć¤Ø¤Š„é„ó„Ą„ą¤ĖĘžĪĻ¤µ¤ģ¤æ£¶£°£²£·£“ £“£±£ø£°£ø £¶£²£·£·£³ £°£°£µ£±£²¤Č¤¤¤¦£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬¶öĮ³¤ĖĄµ¤·¤¤¤ā¤Ī¤Č¤·¤Ę¼č¤ź°·¤ļ¤ģ¤ė³ĪĪؤĻ”¢¤³¤Ī¤č¤¦¤Ź¾ģ¹ē¤Ė¤Ļ£±£°¤Ī£±£“¾čŹ¬¤Ī£±¤Ė¤¹¤®¤Ź¤¤”£
”Ś£°£±£³£·”Ū掣µ£°¤Ļ¤³¤Ī¤č¤¦¤ĖÉōŹ¬¶õ“Ö¤Ī¤ß¤¬£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Č¤·¤ĘĶųĶѤµ¤ģ¤ė¾ģ¹ē¤Ī„¢„É„ģ„¹„Į„§„Ć„Æ¤Ī·ė²Ģ”¢¤¢¤źĘĄ¤Ź¤¤„¢„É„ģ„¹¤¬ĘžĪĻ¤µ¤ģ¤æ¤ČČ½Äź¤µ¤ģ¤Ęɽ¼Ø¤µ¤ģ¤ė„؄锼„į„Ć„»”¼„ø¤ĪĪć¤Ē¤¢¤ė”£
掣µ£°””£Ć£Į£Ō£Ó„¢„É„ģ„¹„Į„§„Ć„Æ·ė²Ģ¤Č¤·¤Ę¤Ī„؄锼„į„Ć„»”¼„ø¤Īɽ¼ØĪć¤ņ¼Ø¤¹æŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢ČÆĮ÷°ĶĶź¤ĖĶѤ¤¤é¤ģ¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤¬¤¢¤źĘĄ¤Ź¤¤¤ā¤Ī¤Ē¤¢¤ė¤³¤Č¤¬É½¼Ø¤µ¤ģ¤Ę¤¤¤ė”£
”Ś£°£±£³£ø”Ū°Ź¾å¤ĪĄāĢĄ¤Ē¤Ļ”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėČĀĮ÷ĀŠ¾Ż¤ņ¼ē¤Č¤·¤ĘŹŖÉŹ¤Č¤·¤Ę¼Ā»Ü·ĮĀÖ¤ņĄāĢĄ¤·¤Ę¤¤æ¤¬”¢„·„¹„Ę„ą¤Ė¤Ŗ¤±¤ėČĀĮ÷ĀŠ¾Ż¤Č¤·¤ĘæĶ“Ö¤ņČĀĮ÷¤¹¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ė”£
””¤³¤Ī¤č¤¦¤Ź¾ģ¹ē¤Ė”¢°Ź¾åĄāĢĄ¤·¤æČĀĮ÷Ļ©¤äĀę¼Ö”¢¤ā¤·¤Æ¤ĻĶĘ“ļ¤Ļ”¢ŹŖÉŹ¤ĪĶ¢Į÷¤Ą¤±¤Ē¤Ź¤ÆæĶ“Ö¤ĪĶ¢Į÷¤Ė¤ā¶¦ĶѤµ¤ģ”¢Ą©øę¶É¤Ė¤ĻæĶ“Ö¤ĪĶ¢Į÷¤ņ¹Ō¤¦¤³¤Č¤¬ÅĮ¤Ø¤é¤ģ”¢Ą©øę¶É¤Ļ¤½¤ĪæĶ“Ö¤Ī¹ŌĄč¤ņ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ė“š¤Å¤¤¤ĘĄ©øꤷ”¢¤Ž¤ææĶ“Ö¤Ī¤æ¤į¤ĖĀę¼Ö¤ĪĀ®ÅŁ”¢²ĆĀ®ÅŁ¤Ź¤É¤ņ¹ĶĪø¤·¤æČĀĮ÷Ą©øę¤ņ¼Ā¹Ō¤¹¤ė”£
”Ś£°£±£³£¹”Ū掣µ£±¤Ļ¤½¤Ī¤č¤¦¤Ź¾ģ¹ē¤ĪČĀĮ÷Ą©øę¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣µ£±””æĶ“Ö¤ņĶ¢Į÷¤¹¤ė¾ģ¹ē¤ĪČĀĮ÷Ą©øę¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤Ę”¢ĶųĶŃ¼Ō£±£°¤Č¤·¤Ę¤ĪæĶ“Ö¤«¤é½ŠČƄ攼„ß„Ź„ė£±£±£³¤ņ²š¤·¤Ę½ŠČÆæ®¹ę”ŹČĀĮ÷»Ų¼Ø殹ę”Ė¤¬Ą©øę¶É£±£µ¤ĖĶæ¤Ø¤é¤ģ¤ė¤Č”¢Ą©øę¶É£±£µ¤Ļ½čĶżĮõĆÖ£²£ø¤Ė¤č¤Ć¤ĘæĶ“Ö¤ņĶ¢Į÷¤¹¤ė¤ĖŬ¤·¤æČĀĮ÷·×²č¤ņĪ©°Ę¤·”¢¤½¤Ī·×²č¤Ė“š¤Å¤¤¤Ę°øĄčĄ©øę²óĻ©£²£°¤ņ²š¤·¤Ę”¢ĶųĶŃ¼Ō£±£°¤Ī¾č¤Ć¤æĀę¼Ö£±£ø¤ĪĮö¹Ō¤ņĄ©øę¤¹¤ė”£
”Ś£°£±£“£°”Ū¤³¤Ī¤č¤¦¤Ź¾ģ¹ē”¢ĶųĶŃ¼Ō£±£°¤Č¤·¤Ę¤ĪæĶ“Ö¤Ļ½ŠČƄ攼„ß„Ź„ė¤Ė¤Ŗ¤¤¤ĘČĀĮ÷ĀŠ¾Ż¤¬ŹŖÉŹ¤Ē¤Ź¤ÆæĶ“Ö¤Ē¤¢¤ė¤³¤Č¤Č”¢¹Ō¤Ąč¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹”¢ĆĻĢ¾”¢¤Ž¤æ¤ĻÅÅĻĆČÖ¹ę¤Ź¤É¤Ī¤č¤¦¤Ė£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤Ē¤¤ė°ĢĆÖ¾šŹó¤ņ„攼„ß„Ź„ė¤ĪĆ¼Ėö¤ņĶѤ¤¤ĘĘžĪĻ¤¹¤ė”£
”Ś£°£±£“£±”Ū掣µ£²¤Ļ¤³¤Ī¤č¤¦¤ŹĘžĪĻŹżĖ”¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣µ£²””æĶ“Ö¤«¤é¤ĪČĀĮ÷»Ų¼Ø殹ę¤ĪĘžĪĻŹżĖ”¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘĆ¼Ėö¤Ī„Ē„£„¹„ׄģ„¤²čĢĢ¾å¤Ėɽ¼Ø¤µ¤ģ¤Ę¤¤¤ėĆĻ掤Ī¾å¤ĒæĶ“Ö¤¬ĆĻÅĄ£Į¤ņĮŖĀņ¤¹¤ė¤Č”¢Ą©øę¶É¤ĻæĶ“Ö¤¬¤½¤ĪĆĻÅĄ£Į¤Ėøž¤«¤¦¤ā¤Ī¤Č²ņ¼į¤·”¢Ą©øę¶É¤ĻæĶ“Ö¤¬¾č¤ģ¤ėĀę¼Ö¤ņ³ä¤źÅö¤Ę¤Ę”¢½ŠČƄ攼„ß„Ź„ė¤Ė²óĮ÷¤¹¤ė”£
””¤½¤·¤Ęµ°Ę»ĄŚ“¹ĮõĆÖ¤äĀę¼Ö¤ĪĀ®ÅŁ¤ņĄ©øꤷ¤Ź¤¬¤é”¢ĢÜÅŖ¤ĪĆĻÅĄ£Į¤Ė¤¢¤ė„攼„ß„Ź„ė¤Ž¤ĒĀę¼Ö¤ņĘ°¤«¤·”¢ĆĻÅĄ£Į¤Ī„攼„ß„Ź„ė¤ĒĀę¼Ö¤ņÄä¼Ö¤µ¤»¤ė”£
””æĶ“Ö¤Ļ¤½¤³¤ĒĀę¼Ö¤«¤é¹ß¤ź¤ė¤³¤Č¤¬¤Ē¤¤ė”£
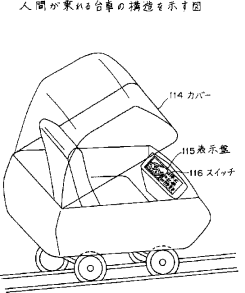
”Ś£°£±£“£²”Ū掣µ£³¤Ļ¤½¤Ī¤č¤¦¤ĖæĶ“Ö¤¬¾č¤ģ¤ėĀę¼Ö¤Ī¹½Ā¤¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣µ£³””æĶ“Ö¤¬¾č¤ģ¤ėĀę¼Ö¤Ī¹½Ā¤¤ņ¼Ø¤¹æŽ
””Āę¼Ö¤Ė¤ĻæĶ“Ö¤¬¾č¤Ć¤Ę²÷Ŭ¤Ė²į¤“¤»¤ė¤č¤¦¤Ė„«„Š”¼£±£±£“¤¬¼č¤źÉÕ¤±¤é¤ģ¤Ę¤Ŗ¤ź”¢°Ų»Ņ¤ĪĮ°¤Ė¤ĻĪć¤Ø¤ŠÉ½¼ØČ×£±£±£µ¤Č”¢Āę¼Ö¤Ī½ŠČÆ”¢Ää»ß”¢¤Ŗ¤č¤Ó¹ŌĄčŹŃ¹¹¤Ź¤É¤ņĄ©øę¤¹¤ė„¹„¤„Ć„Į£±£±£¶¤¬Č÷¤Ø¤é¤ģ¤Ę¤¤¤ė”£
””Āę¼Ö¤Ī²óĻ©¹½Ą®¤Ļ掣·¤ä掣¹¤ĒĄāĢĄ¤·¤æ¤ā¤Ī¤ČʱĶĶ¤Ē¤¢¤ė¤¬”¢¼Ā¹Ō²óĻ©£“£µ¤ĖĀŠ¤·¤Ęɽ¼ØČ×£±£±£µ¤Č„¹„¤„Ć„Į£±£±£¶¤Č¤¬ĄÜĀ³¤µ¤ģ¤Ę¤¤¤ėÅĄ¤¬°Ū¤Ź¤Ć¤Ę¤¤¤ė”£
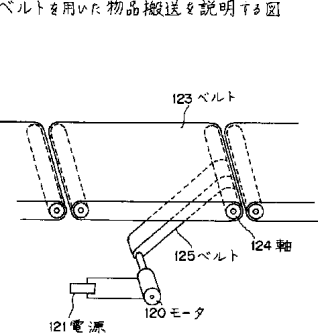
”Ś£°£±£“£³”Ū°Ź¾å¤ĪĄāĢĄ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Īć¤Ø¤ŠČĀĮ÷¤µ¤ģ¤ėŹŖÉŹ¤ĻĶĘ“ļ¤Ė¼żĒ¼¤µ¤ģ”¢Āę¼Ö¤ĖÅėŗܤµ¤ģ¤ĘČĀĮ÷Ļ©¤Č¤·¤Ę¤Īµ°Ę»¾å¤Ē°ÜĘ°¤¹¤ė¤ā¤Ī¤Č¤·¤æ¤¬”¢ŹŖÉŹ¤½¤Ī¤ā¤Ī”¢¤¢¤ė¤¤¤ĻŹŖÉŹ¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ä„«„ׄ»„ė¤Ź¤É”¢¼«ĮöĒ½ĪĻ¤Ī¤Ź¤¤ŹŖĀĪ¤ņ„ķ”¼„锢¤Ž¤æ¤Ļ„Ł„ė„ȤŹ¤É¤Ī¾å¤Ė¾č¤»¤Ę°ÜĘ°¤µ¤»¤ė¤³¤Č¤Ė¤č¤ź”¢ČĀĮ÷¤¹¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ė”£æŽ£µ£“¤Ļ„ķ”¼„é¤ņĶѤ¤¤æČĀĮ÷¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣µ£“””„ķ”¼„é¤ņĶѤ¤¤æŹŖÉŹČĀĮ÷¤ņĄāĢĄ¤¹¤ėæŽ
”Ś£°£±£“£“”Ū掣µ£“¤Ė¤Ŗ¤¤¤Ę”¢ŹŖÉŹ£±£¶¤Ļ²óž„ķ”¼„飱£±£ø¤Ī¾å¤Ė¾č¤»¤é¤ģ¤ė”£
””²óž„ķ”¼„飱£±£ø¤Ļ”¢„Ł„ė„Č£±£±£¹¤Č„ā”¼„棱£²£°¤Ė¤č¤Ć¤Ę²óž¤µ¤»¤é¤ģ”¢¤½¤Ī·ė²ĢŹŖÉŹ£±£¶¤Ļ²óž„ķ”¼„飱£±£ø¾å¤Ē°ÜĘ°¤¹¤ė”£
””£É£Ä„æ„°”¢¤ā¤·¤Æ¤Ļ°øĄč„æ„°¤ņĶѤ¤¤æŹŖÉŹ¤ĪČĀĮ÷Ą©øę¤Ė¤Ä¤¤¤Ę¤Ļøå½Ņ¤¹¤ė”£
”Ś£°£±£“£µ”Ū掣µ£µ¤Ē¤Ļ²óž„ķ”¼„é¤ĪĀå¤ļ¤ź¤Ė„Ł„ė„Č£±£²£³¤¬ĶѤ¤¤é¤ģ¤Ę¤¤¤ė”£
掣µ£µ””„Ł„ė„ȤņĶѤ¤¤æŹŖÉŹČĀĮ÷¤ņĄāĢĄ¤¹¤ėæŽ
””„Ł„ė„Č£±£²£³¤Ļ”¢¹¹¤ĖŹĢ¤Ī„Ł„ė„Č£±£²£µ¤Ī²óž¤Ė¤č¤ė¼“£±£²£“¤Ī²óž¤Ė¤č¤Ć¤ĘĘ°¤”¢¤½¤Ī¾å¤Ė¾č¤»¤é¤ģ¤æŹŖÉŹ¤ņ°ÜĘ°¤µ¤»¤ė¤³¤Č¤Ė¤Ź¤ė”£
”Ś£°£±£“£¶”Ū掣µ£¶¤Ļ„Š”¼„³”¼„ɤņĶѤ¤¤æČĀĮ÷Ą©øꏿ¼°¤ĪĄāĢĄæŽ¤Ē¤¢¤ė”£
掣µ£¶””„Š”¼„³”¼„ɤņĶѤ¤¤æČĀĮ÷Ą©øꏿ¼°¤ņĄāĢĄ¤¹¤ėæŽ
””Ę±æŽ¤Ė¤Ŗ¤¤¤ĘĶĘ“ļ£±£·”¢¤Ž¤æ¤ĻĀę¼Ö£±£ø¤Ė„Š”¼„³”¼„É£±£²£¶¤¬Å½¤é¤ģ¤Ę¤¤¤ė”£
””¤³¤Ī„Š”¼„³”¼„É£±£²£¶¤ĻĮ°½Ņ¤Ī£É£Ä„æ„°”¢¤Ž¤æ¤Ļ°øĄč„æ„°¤ĖĮźÅö¤¹¤ė¤ā¤Ī¤Ē¤¢¤ė”£
”Ś£°£±£“£·”Ū掣µ£¶¤ĒĀę¼Ö£±£ø¤¬°ÜĘ°¤¹¤ė¤Ė¤Ä¤ģ¤Ę”¢„Š”¼„³”¼„É„ź”¼„Ą£±£²£·¤ĪĮ°¤ņ„Š”¼„³”¼„ɤĪ„Š”¼¤¬°ÜĘ°¤¹¤ė”£
””„Š”¼„³”¼„É„ź”¼„Ą£±£²£·¤Ļ”¢„Š”¼„³”¼„É„ź”¼„ĄĄ©øęĮõĆÖ£±£²£ø¤ĪĄ©øę¤Ė±ž¤ø¤Ę”¢ø÷¤ņ„Š”¼„³”¼„ɤĖøž¤±¤ĘČƼĶ¤·”¢„Š”¼„³”¼„ɤ«¤é¤ĪČæ¼Ķø÷¤ņ„ģ„ó„ŗ¤Ē½øø÷¤·¤Ę”¢„»„󄵤Ēø”½Š¤¹¤ė”£
””Čæ¼Ķø÷¤Ī¶ÆÅŁŹŃ²½¤«¤é„Š”¼„³”¼„ɤĖ„ׄź„ó„Ȥµ¤ģ¤æÉä¹ę¤¬²ņĘɤµ¤ģ”¢„Š”¼„³”¼„É„ź”¼„ĄĄ©øęĮõĆÖ£±£²£ø¤Ļ”¢„ģ”¼„ė¤Ź¤É¤ĪÅĮĮ÷„Į„ć„Ķ„ė¤ņ·ŠĶ³¤·¤ĘĘɤ߼č¤Ć¤æ„æ„°¾šŹó¤ņĄ©øę¶É¤ĖĮ÷殤¹¤ė”£
”Ś£°£±£“£ø”Ū„Š”¼„³”¼„ɤĪ¤č¤¦¤Ź„æ„°¤ņ»ČĶѤ·¤æČĀĮ÷Źż¼°¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢ČĀĮ÷Į°¤ĖČÆĮ÷¼Ō¤¬„æ„°„鄤„æ¤ņĶѤ¤¤Ę„æ„°¤ĖŹŖÉŹ¤Ī°øĄč¤ņµĻ椹¤ė”£
””¤Ž¤æ¤Ļ¹¹¤ĖĄ©øę¶É¤¬¤½¤ĪŹŖÉŹ¤Ī£É£Ä¤Č”¢ŹŖÉŹ¤Ī°øĄč¤ņ£±ĮȤĪ„Ē”¼„æ¤Č¤·¤Ę”¢„Ē”¼„æ„Ł”¼„¹¤Ėµ²±¤¹¤ė”£
”Ś£°£±£“£¹”ŪŹŖÉŹ¤ĪČĀĮ÷¤¬³«»Ļ¤µ¤ģ¤ė¤Č”¢Ą©øę¶É¤Ļ¤½¤ĪŹŖÉŹ¤ņ°øĄč¤Ėøž¤«¤Ć¤ĘČĀĮ÷¤¹¤ė¤č¤¦¤ĖĀę¼Ö¤ĪÄĢ²į¤¹¤ėµ°Ę»¤ņ½ŠČÆÅĄ¤ĒĄÜĀ³¤·”¢¤Ž¤æĀę¼Ö¤Ė²ĆøŗĀ®¤Ī»Ų¼Ø¤ņ½Š¤¹”£
””°øĄč¤Ž¤Ē¤ĪČĀĮ÷Ļ©¤ĪÅÓĆę¤ĒČĀĮ÷Ļ©”¢Īć¤Ø¤Šµ°Ę»¤ĖÉÕæļ¤·¤ĘĄßĆÖ¤µ¤ģ¤Ę¤¤¤ė„æ„°„ź”¼„Ą¤Ė¤č¤Ć¤Ę„æ„°¤ĪĘāĶʤ¬Ęɤ߼č¤é¤ģ”¢Ą©øę¶É¤ĖĮ÷¤é¤ģ¤ė”£
””Ą©øę¶É¤Ļ”¢ĘāĶʤ¬ŹŖÉŹ£É£Ä¤Ē¤¢¤ģ¤Š„Ē”¼„æ„Ł”¼„¹¤ņ»²¾Č¤·¤ĘŹŖÉŹ¤Ī°øĄč¤ņø”½Š¤·”¢ø”½Š¤µ¤ģ¤æ°øĄč¤Ėøž¤«¤Ć¤Ęµ°Ę»ĄŚ“¹ĮõĆÖ¤ņĄ©øꤷ¤Ę”¢Āę¼Ö¤ņ°ÜĘ°¤µ¤»¤ė”£
”Ś£°£±£µ£°”Ū¹¹¤Ė°ģ¤Ä¤ĪČĀĮ÷„Ķ„Ć„Č„ļ”¼„Ƥ«¤éŹĢ¤ĪČĀĮ÷„Ķ„Ć„Č„ļ”¼„ƤĖĀę¼Ö”¢¤ā¤·¤Æ¤ĻĶĘ“ļ¤¬°ÜĘ°¤¹¤ė»ž¤Ė¤Ļ”¢„æ„°„ź”¼„Ą¤Ė¤č¤Ć¤Ę„æ„°¤ĪĘāĶʤņĘÉ¤ß¼č¤ź”¢°ÜĘ°Ąč¤Ī„Ķ„Ć„Č„ļ”¼„ƤĖĀŠ¤¹¤ėĄ©øę¶É¤Ė¤½¤ĪĘāĶʤņµ²±¤µ¤»”¢°øĄč¤Ų¤ĪČĀĮ÷¤ĖĶѤ¤¤ė”£
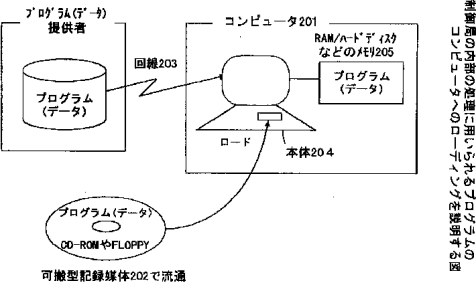
”Ś£°£±£µ£±”ŪŗĒøå¤ĖĖÜČÆĢĄ¤Ī¼Āø½¤Ī¤æ¤į¤Ī„ׄķ„°„é„ą¤Ī„³„ó„Ō„唼„æ¤Ų¤Ī„ķ”¼„Ē„£„ó„°¤Ź¤É¤Ė¤Ä¤¤¤Ę”¢æŽ£µ£·¤ņĶѤ¤¤ĘĄāĢĄ¤¹¤ė”£
掣µ£·””Ą©øę¶É¤ĪĘāÉō¤Ī½čĶż¤ĖĶѤ¤¤é¤ģ¤ė„ׄķ„°„é„ą¤Ī„³„ó„Ō„唼„æ¤Ų¤Ī„ķ”¼„Ē„£„ó„°¤ņĄāĢĄ¤¹¤ėæŽ
””ĖÜČÆĢĄ¤Ī¼Ā»Ü¤Ī·ĮĀÖ¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Īć¤Ø¤ŠæŽ£“£³”¤æŽ£“£“”¤æŽ£“£·”¤æŽ£“£ø”¤æŽ£“£¹¤ĒĄāĢĄ¤·¤æ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĪĘÉ¤ß¼č¤ź¤Ī¤æ¤į¤Ė»ČĶѤ¹¤ė„ׄķ„°„é„ą¤ņ”¢Īć¤Ø¤Š„Õ„ķ„Ć„Ō„£„Ē„£„¹„ƤŹ¤É¤Ė³ŹĒ¼¤·¤Ę”¢Ą©øę¶É¤ĪĘāÉō¤Ī½čĶżĮõĆÖ¤ĖĀŠ±ž¤¹¤ė„³„ó„Ō„唼„æ¤Ė„ķ”¼„ɤ¹¤ė¤³¤Č¤¬²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£±£µ£²”Ū掣µ£·¤Ė¤Ŗ¤¤¤Ę”¢Į°½Ņ¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹ĘÉ¼č¤ź½čĶżĶѤĪ„ׄķ„°„é„ą¤Ź¤É¤Ļ”¢„³„ó„Ō„唼„棲£°£±¤ĪĘāÉō¤Ī„į„ā„ź£²£°£µ¤Ė³ŹĒ¼¤µ¤ģ¤Ę”¢ĖÜĀĪ£²£°£“¤Ė¤č¤Ć¤Ę»ČĶѤµ¤ģ¤ė¤³¤Č¤ā”¢¤Ž¤æ„ׄķ„°„é„ąÄ󶔼ŌĀ¦¤«¤é²óĄž£²£°£³¤ņ²š¤·¤Ę„³„ó„Ō„唼„棲£°£±¤Ė„ķ”¼„ɤµ¤ģ¤Ę»ČĶѤµ¤ģ¤ė¤³¤Č¤ā”¢¤Ž¤æ„Õ„ķ„Ć„Ō„£„Ē„£„¹„ƤŹ¤É¤Ī²ÄČĀ·æµĻæĒŽĀĪ£²£°£²¤¬„³„ó„Ō„唼„棲£°£±¤ĪĖÜĀĪ£²£°£“¤Ė„ķ”¼„ɤµ¤ģ¤Ę»ČĶѤµ¤ģ¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£±£µ£³”Ū„į„ā„ź£²£°£µ¤Č¤·¤Ę¤Ļ”¢£Ņ£Į£Ķ”¢„Ļ”¼„É„Ē„£„¹„ƤŹ¤É¤Ī³Ę¼ļ¤Īµ²±ĮõĆÖ¤ņ”¢¤Ž¤æ²ÄČĀ·æµĻæĒŽĀĪ£²£°£²¤Č¤·¤Ę¤Ļ£Ć£Ä”Ż£Ņ£Ļ£Ķ”¤„į„ā„ź„«”¼„É”¢„Õ„ķ„Ć„Ō„£„Ē„£„¹„Æ”¢ø÷¼§µ¤„Ē„£„¹„Æ”¢ø÷„Ē„£„¹„Æ”¢¤½¤ĪĀ¾³Ę¼ļ¤ĪµĻæĒŽĀĪ¤ņ»ČĶѤ¹¤ė¤³¤Č¤¬²ÄĒ½¤Ē¤¢¤ė”£
”Ś£°£±£µ£“”Ū°Ź¾å¤Ė¤Ŗ¤¤¤Ę¤Ļ”¢Īć¤Ø¤ŠĆĻ¾å”¢¤Ž¤æ¤ĻĆĻ²¼¤ĖÉÕĄß¤µ¤ģ¤æČĀĮ÷Ļ©¤Č¤·¤Ę¤Īµ°Ę»¾å¤ņ”¢ŹŖÉŹ¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ņÅėŗܤ·¤æĀę¼Ö¤¬°ÜĘ°¤·¤ĘČĀĮ÷¤µ¤ģ¤ėĪć¤ņ¼ē¤Č¤·¤Ę”¢øų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą¤Ī¼Ā»Ü·ĮĀÖ¤ņĄāĢĄ¤·¤æ¤¬”¢ČĀĮ÷Ļ©¤ĻĪć¤Ø¤ŠĆĻɽ”¢æåĆę”¢æå¾å”¢¤Ž¤æ¤Ļ¶õ“Ö¤ĖÉߥߤµ¤ģ¤æ¤ā¤Ī¤Ē¤ā¤č¤¤”£
””ŹŖÉŹ¤ņ¼żĒ¼¤·¤æĶĘ“ļ¤ņÅėŗܤ·¤æĀę¼Ö¤ĪĀå¤ļ¤ź¤ĖŹŖÉŹ”¢ŹŖ¼Į”¢²ßŹ¾”¢»ęŹ¾”¢¾šŹóµ²±ĒŽĀĪ”¢¤Ž¤æ¤ĻĄøŹŖ¤ņ¤½¤Ī¤Ž¤Ž”¢¤Ž¤æ¤Ļ¤³¤ģ¤é¤ņĄŃŗܤ·¤æ„«„ׄ»„ė¤ņ¤½¤Ī¤Ž¤Ž”¢¤Ž¤æ¤Ļ¤½¤Ī„«„ׄ»„ė¤ņÅėŗܤ·¤æĀę¼Ö¤ņČĀĮ÷¤¹¤ė¤³¤Č¤ā²ÄĒ½¤Ē¤¢¤ź”¢Īć¤Ø¤ŠæŽ£²¤ĪĪĮ¶ā·čŗŃÉō¤Ė¤č¤Ć¤Ę·čŗѤµ¤ģ¤ėĪĮ¶ā¤ĻŹŖÉŹĀå¶ā¤Ą¤±¤Ē¤Ź¤Æ”¢Į÷ĪĮ”¢æ¶ĀŲ¼źæōĪĮ”¢¤Ž¤æ¤ĻĄĒ¶ā¤Ē¤¢¤Ć¤Ę¤ā¤č¤¤”£
”Ś£°£±£µ£µ”Ū¹¹¤ĖČĀĮ÷Ļ©¤ĻĮ°½Ņ¤Ī¤č¤¦¤Ė„ķ”¼„é¤ä„Ł„ė„ȤĖ¤č¤Ć¤Ę¹½Ą®¤µ¤ģ¤Ę¤ā¤č¤Æ”¢„±”¼„Ö„ė”¢ČÄ”¢„Õ„Ć„Æ”¢„¢”¼„ą”¢„Į„§„¤„󔢻õ¼Ö”¢„·„唼„攢æäæŹĮõĆÖ”¢¶õµ¤°µ”¢µ¤ĀĪ°µ”¢æå°µ”¢Ģż°µ”¢¤ā¤·¤Æ¤ĻŹŖĶżÅŖµ”¹½¤Ė¤č¤Ć¤ĘČĀĮ÷¤µ¤ģ¤ė¤ā¤Ī¤Ē¤ā¤č¤¤”£
””¤³¤Ī¤č¤¦¤ŹČĀĮ÷Ļ©¾å¤ņ”¢ŹŖÉŹ¤ņÅėŗܤ·¤æ¼«ĮöĒ½ĪĻ¤Ī¤Ź¤¤ĶĘ“ļ”Ź„«„ׄ»„ė”Ė¤ņ°ÜĘ°¤µ¤»¤ė¤³¤Č¤ā¤Ē¤¤ė”£
”Ś£°£±£µ£¶”Ū¹¹¤ĖĮ°½Ņ¤Ī£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤µ¤ģ¤ė¾šŹó¤Č¤·¤Ę¤Ļ”¢ÅÅĻĆČÖ¹ę¤Ą¤±¤Ē¤Ź¤Æ”¢Ķ¹ŹŲČÖ¹ę”¢½»½ź”¢„¤„ó„攼„Ķ„Ć„Č„¢„É„ģ„¹”¢½¾¶Č°÷ČÖ¹ę”¢øܵŅČÖ¹ę”¢ĶųĶŃ¼ŌĢ¾”¢ĶųĶŃ¼Ō¼Ģæ攢¾ŚĢĄ½ńČÖ¹ę”¢¾ŚĢĄ½ń”¢ÅĮɼČÖ¹ę”¢ÅĮɼ”¢Ģ¾»É”¢·ŠÅŁ”¦°ŽÅŁ”¢¼±ŹĢ»Ņ”¢æōĆĶ”¢¤Ž¤æ¤Ļ„Ž„ė„Į„į„Ē„£„¢¾šŹó¤Ē¤¢¤Ć¤Ę¤ā¤č¤¤”£
””¤³¤ģ¤é¤¬Īć¤Ø¤ŠĶųĶŃ¼Ō¤«¤é”¢¤¢¤ė¤¤¤Ļ·×»»µ”„·„¹„Ę„ą”¢„¤„ó„攼„Ķ„Ć„Č”¢ÅÅĻĆĢÖ”¢ÅÅæ®ĢÖ”¢¤ā¤·¤Æ¤Ļ·×»»µ”„Ķ„Ć„Č„ļ”¼„Ƥ«¤éĘžĪĻ¤µ¤ģ¤ė¤³¤Č¤Ė¤č¤Ć¤Ę”¢¤³¤ģ¤é¤Ī¾šŹó¤¬£Ć£Į£Ō£Ó„¢„É„ģ„¹¤ĖŹŃ“¹¤µ¤ģ¤ĘČĀĮ÷¤Ė»ČĶѤµ¤ģ¤ė”£
”Ś£°£±£µ£·”Ū
”ŚČÆĢĄ¤Īøś²Ģ”Ū°Ź¾å¾ÜŗŁ¤ĖĄāĢĄ¤·¤æ¤č¤¦¤Ė”¢ĖÜČÆĢĄ¤Ė¤č¤ģ¤Š”¢£±¤Ä°Ź¾å¤ĪĄ©øę¶É¤Ė¤č¤Ć¤ĘČĀĮ÷Ļ©„Ķ„Ć„Č„ļ”¼„ƤĖ¤Ŗ¤±¤ė¼«Ę°ČĀĮ÷¤ņĄ©øꤷ”¢„Ķ„Ć„Č„ļ”¼„ƾå¤Ī¤¢¤é¤ę¤ėĆĻÅĄ¤ņ„ę„Ė”¼„ƤŹ£Ć£Į£Ō£Ó„¢„É„ģ„¹¤Ė¤č¤Ć¤Ęɽ¤¹¤³¤Č¤Ė¤č¤ź”¢ŹŖĪ®¤¬¹āÅŁ¤Ė¼«Ę°²½¤µ¤ģ”¢Ķ¢Į÷¤ĪÄć„Ø„Ķ„ė„®”¼²½”¢Ķ¢Į÷ÉŹ¼Įøž¾å”¢¹āĀ®²½”¢Äćøų³²²½”¢øņÄĢ»öøĪøŗ¾Æ¤Ź¤É¤ĪĀē¤¤Źøś²Ģ¤¬ĘĄ¤é¤ģ¤ė”£
””ĖÜŹø½ń¤Ļ”¤”ÖĘƵöÄ£”äĘƵöÅÅ»Ņ掽ń“Ū”äĘƵö”¦¼ĀĶŃæ·°Ę”äĘƵö”¦¼ĀĶŃæ·°ĘŹøø„ČÖ¹ęŗ÷°ś¾Č²ń”פ«¤é”¤ĘƵöøų³« 2000-357194 ”Öøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą”×”ŹČÆĢĄ¼Ō”į±ąÉōĄµ¹¬”Ė¤ĪĘƵöĢĄŗŁ¤ņ„Ą„¦„ó„ķ”¼„ɤ·¤Ę”Ź2002ĒÆ8·ī”Ė·Ēŗܤ¹¤ė¤ā¤Ī¤Ē¤¹”„
””Ęɤߤ䤹¤µ¤ņ¹ĶĪø¤·¤Ę”¤Źø»ś¤Ė¤Ä¤¤¤Ę¤Ļ„Õ„©„ó„Č”¤æ§”¤²ž¹Ō”¤¤Ž¤æ”¤²čĮü¤Ė¤Ä¤¤¤Ę¤Ļ½Ģ¼Ü¤ņ°ģÉōŹŃ¤Ø¤Ę¤¤¤Ž¤¹¤¬”¤ĘāĶʤĖ¤Ä¤¤¤Ę¤Ļøķµ¤ā“Ž¤į¤Ę°ģĄŚŹŃ¹¹¤·¤Ź¤¤¤Ē·Ēŗܤ·¤Ę¤¤¤Ž¤¹”„ĖÜ„Š”¼„ø„ē„ó¤ĪĢµĆĒžŗÜ”¤ĢµĆĒĒŪÉŪ¤ņ¤ŖĆĒ¤ź¤¤¤æ¤·¤Ž¤¹”„
””ø¶ĖܤĻ²¼µĘƵöÄ£„µ„¤„ȤĒ¤“¹āĶ÷¤Æ¤Ą¤µ¤¤”„
””„Ó„ø„Ķ„¹”¦ø¦µę¤Ī¤ŖĢä¹ē¤»¤Ļ±ąÉōø¦¤Ž¤Ē¤É¤¦¤¾”„
”ö””„ź„ó„Æ
””¢£””ĘƵöøų³«2000-357194”Öøų½°¼«Ę°ČĀĮ÷„·„¹„Ę„ą”× ”ŹĘüĖܹńĘƵöÄ£”Ė
![]()
![]()
![]()
- Copyright © sonobelab.com, Masayuki Sonobe 2002-2026.
- ŗĒ½Ŗ¹¹æ·Ęü 559ĘüĮ°: 2024. 9. 3 Tue 14:24
- ĖÜ„Ś”¼„ø¤Ī„¢„Æ„»„¹æō”Ź2002.08.23”Į”Ė
00,023,755
- ±ąÉōø¦””¤Ī„¢„Æ„»„¹æō”Ź2002.07.01”Į”Ė
06,546,866





{kind=link}